




1. 概述
本篇主要介紹在Zynq平臺編寫中斷相關的驅動程序時,涉及CPU私有中斷的相關綁定辦法。
2. 私有中斷簡介
私有中斷是多核CPU上特有的中斷,私有中斷只能被其所有者核心獲取和響應,不會被其他核發現。常見的私有中斷有全局定時器,私有看門狗定時器,私有定時器等,Zynq平臺上還有來自PL的FIQ\IRQ。
3. 私有中斷的綁定方法
3.1 常規共享中斷綁定
Zynq平臺使用的是GIC通用中斷框架,常規的共享中斷綁定和普通的中斷綁定沒有區別,在SylixOS上直接調用API_InterVectorConnect、API_InterVectorEnable這兩個函數即可綁定,綁定後中斷可由任意一個CPU核心響應。
3.2 私有中斷綁定
私有中斷只能有所有者核心獲取和響應,因此對應的中斷和中斷服務是綁定在相關的CPU核心上。在SylixOS下綁定私有中斷需要讓常規共享中斷的綁定流程在對應CPU核心上完成才能成功綁定。即在驅動綁定私有中斷的時候創建一個綁定在對應CPU核心上的綁定線程,然後由這個綁定線程去完成私有中斷綁定。綁定流程如圖 3.1示。
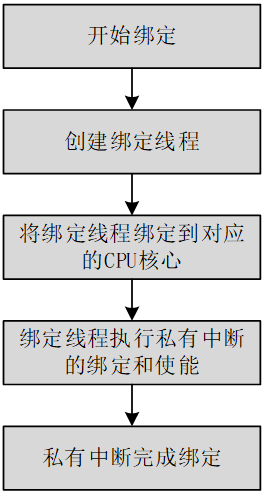
圖 3.1私有中斷綁定流程
Zynq平臺31號私有定時器中斷綁定框架如程序清單 3.1所示。
程序清單 3.1 Zynq平臺31號私有定時器中斷綁定框架
#define ZYNQ_VECTOR_NIRQ 31 /* 31號私有中斷 */
static LW_HANDLE _G_bindthread = LW_OBJECT_HANDLE_INVALID;
static LW_HANDLE _G_syncSignal = LW_OBJECT_HANDLE_INVALID;
/***************************************************************************
** 函數名稱: __nIrqIsr
** 功能描述: 中斷服務程序
** 輸 入 : pvArg
** 輸 出 : NONE
** 返 回 : LW_NULL
***************************************************************************/
static irqreturn_t __nIrqIsr (PVOID pvArg)
{
return LW_IRQ_HANDLED;
}
/***************************************************************************
** 函數名稱: __bindThread
** 功能描述: 私有中斷綁定線程
** 輸 入 : pvArg
** 輸 出 : NONE
** 返 回 : LW_NULL
***************************************************************************/
static PVOID __bindThread (PVOID pvArg)
{
API_SemaphoreBPend(_G_syncSignal,
LW_OPTION_WAIT_INFINITE); /* 等待同步信號量 */
API_InterVectorConnect(ZYNQ_VECTOR_NIRQ, /* 連接中斷服務程序 */
(PINT_SVR_ROUTINE)__nIrqIsr,
(PVOID)NULL,
"nIrq");
API_InterVectorEnable(ZYNQ_VECTOR_NIRQ); /* 使能中斷 */
}
/***************************************************************************
** 函數名稱: __nIrqInit
** 功能描述: 中斷服務初始化
** 輸 入 : NONE
** 輸 出 : NONE
** 返 回 : 成功返回ERROR_NONE,失敗返回PX_ERROR
***************************************************************************/
INT __nIrqInit (VOID)
{
LW_CLASS_CPUSET cpuset;
_G_syncSignal = API_SemaphoreBCreate("SYNCSEM", /* 創建同步等待信號 */
0,
LW_OPTION_OBJECT_GLOBAL,
LW_NULL);
if (_G_syncSignal == LW_OBJECT_HANDLE_INVALID) { /*判斷信號量創建是否成功*/
printk ("BIND signal init failed !\r\n");
return PX_ERROR;
}
/*
* 設置線程CPU綁定屬性
*/
LW_CPU_ZERO(&cpuset);
LW_CPU_SET(0, &cpuset);
_G_bindthread = API_ThreadCreate("bindThread", /* 創建綁定線程 */
__bindThread,
LW_NULL,
LW_NULL);
if (_G_bindthread == LW_OBJECT_HANDLE_INVALID) { /*判斷綁定線程是否創建成功*/
printk ("BIND thread init failed !\r\n");
return PX_ERROR;
}
API_ThreadSetAffinity(_G_bindthread, /* 將綁定線程設置到CPU0上*/
sizeof(cpuset),
&cpuset);
API_SemaphoreBPost(_G_syncSignal); /* 發送信號啓動綁定線程 */
}