




流程:
採集圖像→圖像濾波增強→圖像分割→特徵提取→特徵分類
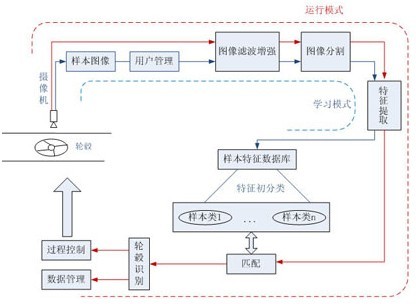
學習模式:採集樣品輪轂圖像、獲取樣本特徵參數並寫入樣品輪轂特徵數據庫中。
運行模式:對生產線上的輪轂進行識別和檢測,併發送識別結果和控制信號。
特徵識別過程:
1)確定輪轂外輪廓直徑
2)確定各孔軸的個數、位置及直徑。
3)描述輻孔特徵。
4)定位輪轂中心軸。
5)遮擋條件下完成1)2)3)4)功能。
應用到的中心定位算法
常用的中心求取方法可以分爲基於灰度和基於邊緣的兩大類。基於灰度的方法一般利用目標的灰度分佈信息,如質心法、曲面擬合法等。基於邊緣的方法一般利用目標的邊緣形狀信息,這些方法有邊緣圓(橢圓)擬合、Hough變換等。另外還有正交掃描法,圓周投影法等,一般而言,基於灰度的方法比較適用於較小的且灰度分佈均勻的目標,而基於邊緣的方法則適合較大的目標,它對灰度的分佈不太敏感。
考慮到系統工作的環境有可能收到光線或背景的干擾,使按照單純依靠上述算法提取出來的輪轂中心的精度不夠。根據不同的輪轂圖像二值化質量分別採用圓擬合法或質心法定位中心,最後優化中心點位置,即使應用在輪轂圖像質量比較差的識別中,搜索中心點的精確度還是比較滿意。
最小二乘法擬合法求取目標輪廓中心的基本原理是先對目標所有邊緣點擬合出綜合圓心和半徑,利用這個綜合圓心和半徑對這些邊緣點進行檢查,去掉太遠和太近的點,把剩下的邊緣點再進行“最小二乘法”擬合,進行2-3次迭代後,可得到圓心位置的精確值以及圓弧半徑。最小二乘擬合算法在充分考慮了各邊界點的影響前提下,不要求嚴格通過所有邊緣點,而追求整體誤差最小,具有整體精度較高,測量精度穩定的優點。但它的缺點也十分明顯,即抗干擾性能差,當存在隨機噪聲時中心運算精度會明顯降低;當干擾強度較大時所得圓心甚至可能明顯錯誤。
在輪轂識別的實際工作環境中,由於不良光源或不良背景的干擾,提取的輪轂外輪廓弧形往往被幹擾,對於被遮擋情況下,得出的外輪廓更加複雜。試驗表明如果直接用最小二乘迭代擬合這些存在部分區域失真的邊緣,最後得出的圓心位置與實際圓心偏差比較大或偏離甚遠。
由於本文所描述的產品外徑規格在14-21英寸間,即輪轂的外輪廓的曲率在一定的範圍間,而且合格輪轂的外緣呈標準圓形。所以用曲率作爲一個約束條件,將外輪廓點序列中不合該條件的點刪除,經過這樣的數據預處理後,濾掉了輪廓噪聲點的影響,將篩選出的點集進行最小二乘迭代擬合。