




前言: 2015年,整個超聲技術界最引人注目的事情莫過於高通推出了超聲波指紋識別技術Sense ID,而小米手機也成功搭載了這一項黑科技。自上世紀五十年代全國超聲熱之後,超聲技術終於有機會成爲大衆話題之一
超聲檢測技術基礎之基礎
絕大多數超聲波的檢測技術原理都基於pulse-echo——你在山谷裏喊一聲就是pulse, 被巖壁或者樹反射回來的回聲就是echo。
對於超聲檢測而言,特製的晶片(稱爲換能器)在電脈衝的激勵下,產生機械振動(類似於人摸一下電門渾身一抖),振動產生超聲波脈衝(pulse),超聲波脈衝在傳播過程中,會被傳播介質(如人體)一部分一部分地被反射或者散射回來(echo),尤其是介質中物理性質不連續的地方,(比如手機上方的一根手指),反射波尤爲強烈。反射或散射回換能器的回波,又使換能器產生振動,這種振動被換能器轉換爲電信號,對於電信號進行不同的處理,可以得到不同的信息,比如傳播介質的結構,有沒有運動的物體在介質中,介質的彈性等等。
如果把超聲波的聲束想像成一條線,那麼一次超聲PULSE-ECHO得到的通常只有一條線的信息,指紋至少是一個面,用超聲掃描的方式在不同的位置進行PULSE-ECHO就能夠得到一系列線的信息,從而獲取整個指紋信息。醫院裏用的超聲成像設備也大多就是這樣的工作原理。
指紋識別超聲
從高通的宣傳視頻(h可以確認:SenseID技術中,超聲波是垂直於手指表面發射的。不管內部的具體實現,其基於的基本原理就是下圖所示,
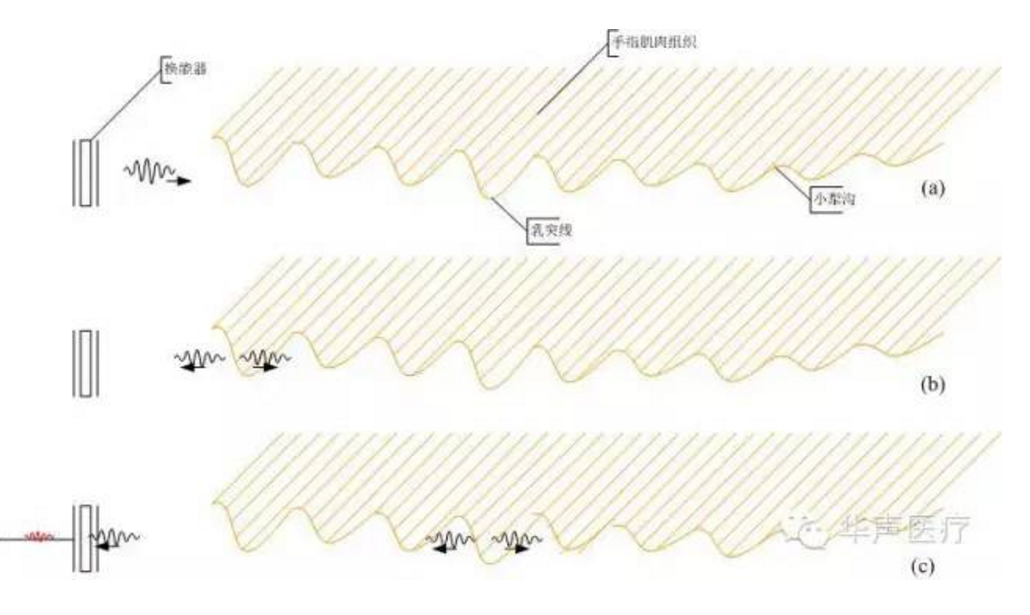
相信你只要一看,大致就能看明白,馬上可以回家告訴你家孩子。
你:“聲波傳播速度是340m/s,如果小換能器到乳突線距離是d0, 聲波傳播的時間就是d0/340,而到小犁溝距離是d1, 聲波傳播的時間就是d1/340,d1>d0,所以對着小犁溝時聲波回來慢一點,這樣我們根據時間先後就可以知道究竟是線還是溝……”
你開始等待着孩子帶着崇拜眼神說“粑粑你好厲害哦”。
你家孩子:“粑粑,你好象說得不對……”
你怒:“什麼不對?老溼上課講過的,時間=距離除以速度,你又全忘了是不是,老子收拾你!”
你家孩子:“可是聲波過去還要回來,傳播的距離不應該是2d0,2d1嗎?”
你:“……”
好吧,我承認上面那個糗是我犯下的,不過不影響原理說明。重點就是,這種情況,聲波被髮射然後返回的時間有先後。相鄰位置,時間短的是線,時間長的是溝。
現在問題來了,如果超聲波束只是一條垂直於手指表面的線,只能得到手指上某一點到換能器的距離,要得到完整的指紋信息,假定指紋識別精度要求到0.2mm,超聲波束的間距至少應該小於0.1mm,假定識別的指紋面積爲8mm*8mm,則需要得到80*80個點的信息纔是完整的指紋信息,相應地,也就需要80*80條超聲波束,所以技術的核心解決問題在於:短時間內,如何得到這近4千條超聲波束的信息?(各位可以腦補一下:一個小機器人扛着超聲換能器,一個位置接一個位置跑,每跑一個位置發射接收一次超聲波,估計跑不了100個位置小機器人就加入叛軍參加對地球人的進攻了)。
那麼,究竟如何得到這80*80個點甚至更多點的信息?
*注:乳突線和小犁溝分別得到的回波差異可能不僅僅是時間先後,有可能回波強度也有較大差別,都可以用於形成指紋圖像。爲了說明得比較直觀,這裏選用了最簡單的時間先後。
手機上採用的指紋識別技術

上圖是從一家叫sonavation的公司網站上 (http://www.sonavation.com/ ultrasound-biometric - sensor/)扒下來的,顯示的不是蜂窩,豎起的一根根小柱子是超聲波換能器。其中道理很簡單——讓一個小機器人扛着超聲波換能器跑,不如干脆搞幾千個並排的超聲換能器放那裏別動(業界稱爲矩陣陣列,MATRIX ARRAY),各自獨自工作(也可以像控陣雷達一樣,合併起來用,獨自幹活還是合併使用完全取決於集成的ASIC芯片運算能力)。每個換能器可以得到與其正對位置回波的傳播時間,從而判斷究竟是線還是溝。

上圖是Sonavation網站提供他的們現有產品的原型圖片,左邊的長方形是換能器矩陣,中間的小黑塊是ASIC。以下是這家公司識別出的指紋(圖中提到乳突線上還有些小洞叫pores,也可以幫助指紋識別),基本上可以確定高通使用的也是類似方案。