




最近航天十三所的李博士(SAG重力儀的首席)來單位做SAG重力儀的原理和操作培訓,在原理講解的時候,她說了一個重要的算法就是卡爾曼濾波,我知道卡爾曼濾波的大概原理就是:通過初始值、協方差陣和觀測值,獲取下一時刻的最優值。
觀測值就是:GPS,三個方向的重力加速度,三個姿態角加速度
初始值:初始的重力值
通過GPS的位置獲取協方差陣
關於初始值獲取,平臺式和捷聯式重力儀都需要通過碼頭靠泊實現,平臺式重力儀比如GT通過平臺的加持,比較容易獲取重力值;而SAG的重力儀沒有平臺,它是通過XY平面的重力值爲0獲取初始重力值,即可以這樣理解,它是通過計算獲取虛擬平面。
目前通過與同級別重力儀的比對,SAG重力儀通過純計算的方法,比同級的平臺式重力儀比如DGS,KSS以及L&R獲取更優的結果,說明我們的算法非常的厲害。
由SAG重力儀的彎道超車,我想起來多波束以及聲納的事情。
比如kongsberg多波束的波束形成質量非常好,主要原因就是:
(1)發射波束比較窄的主要是通過硬件來實現,這個目前國內能夠做到
(2)波束指向性(聚焦)比較好,就是相位疊加算法做得比較好
(3)底跟蹤檢測算法可靠,但地質比較軟的時候,仍然有kongsberg梗的問題
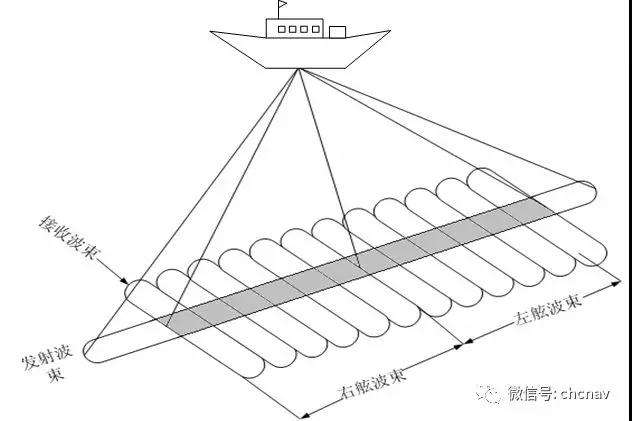
波束形成主要是算法問題,波束聚焦(旁瓣的壓制)也是通過算法實現的,每個基元收到的波形,通過一定的延遲疊加獲取某個方向的水深,首先需要消除波形的噪聲,然後將延遲的相位進行疊加,得到某個方向的水深值。
延遲時間=基元間距*sin角度/換能器處聲速
市面上的國產多波束有1個問題就是邊緣波束跳躍比較厲害,平坦海底表現尤其明顯,原因可能是:噪聲消除,相位疊加算法和底檢測算法某些地方有所欠缺。
合成孔徑聲納可以看成是側掃聲納的升級技術,一是發射頻率更低,可以到10kHz,穿透更強,二是可以獲取很高的分辨率,但是它的限制就是對船舶駕駛要求比較高,即航線要直。合成孔徑其實也是一種算法。
不知最近軍事上大熱的有源相陣控技術是不是採用這種辦法。


