




今天非常不順利,無人船的各個子系統都出現問題,不過都逐一解決
1、首先講一下作業順序:
1)布放和操作遙控器充電
將攜帶的發電機發動起來,將無人船的開關打到“岸電”,給UPS充電,將底層電源開關打開,遙控器就可以與無人船進行連接了
MBR和無人船顯控打開,連接好,將MBR天線搬至高處
將多波束採線控打開,加入到MBR的第三方
2)用遙控打開UPS,注意有延遲,約3分鐘;關閉UPS也有延遲3分鐘,也可在中艙手動打開UPS
3)過5-10分鐘,啓動無人船導航軟件,左上角兩個圖標由紅變綠,正常
4)給sonar主機加電,多波束-側掃 oFF改成ON
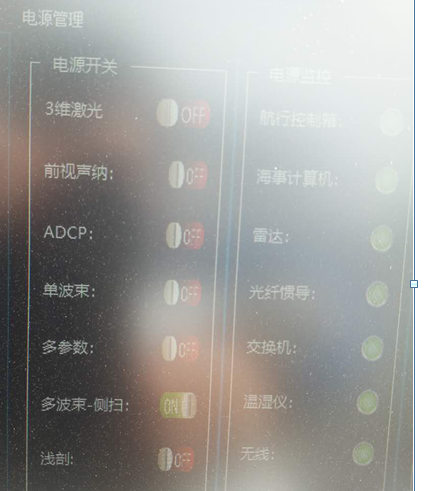
5)檢查激光雷達是否打開
如果沒打開,就沒有激光面板,只有AIS和雷達
6) 吊裝到水面

7)吊船至海中,固定住船頭和船尾。在不脫鉤的狀態下用遙控器啓動發電機、發動機,觀察各設備和倒鬥油門是否正常。
2、先啓動發電機,再啓動主機,標誌就是:發電機和主機的冷卻水噴口出水

3、使用布放遙控器將對接按鈕向下撥,使艇脫鉤並迅速將重錘吊離。抽離布放繩子將艇駛離母船。
4個按鈕,第2個按鈕“對接”是控制落錘的抱緊和鬆開 向上是落錘抱緊,向下時落錘鬆開
可以先掰好,再進行吊裝嘗試;落錘時,等吊帶鬆弛了以後上掰

4、遠程登錄聲納主機,啓動多波束和聲納軟件
多波束聲納的預設水深比工作水域水深大5-10m;側掃聲納的量程設置爲工作水域的水深的6-8倍
5、多波束界面:

1)輸入預設水深。預設水深應比用戶預知的待測水深略大。建議以5m爲單位設置,例如水深大致爲8m,用戶可設爲10m。
2)設置水下模式(可選)。用戶可根據使用需求決定是否設置水下模式,如果在岸上測試則不設置,探頭入水則可設置。
3)配置參數。按照用戶模式配置參數。
4)配置傳感器。打開傳感器串口界面,配置慣導和GPS的端口號,並打開串口。
5)點擊啓動按鍵。
存儲目錄 S7k是水深數據 RawData是原始數據,數據量大需要刪除
6、側掃聲納界面:

側掃聲納步驟與多波束類似:
1)配置量程
2)設置水下/水下模式,水上模式可以檢查設備是否正常
3)下傳參數
4)配置GPS串口號並打開串口
5)啓動
6)查看狀態,在軟件底部
狀態信息欄位於軟件底部。
幀號爲當前讀取數據的幀號,包數爲當前讀取幀號數據的包數;
導航以及經緯度等數值在連入GPS或慣導之後有相應信息顯示。
7、無人艇電腦端操作
遙控模式權限最高,當遙控設置爲上層模式,交給電腦控制
將模式設置爲自主模式
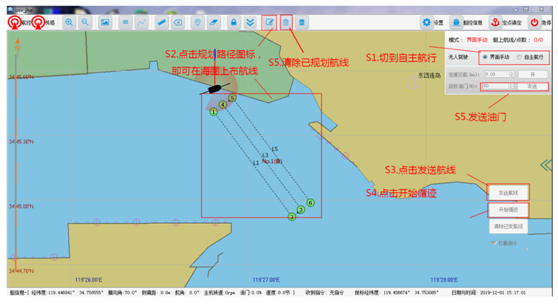
第一步:切換到自主航行模式;
第二步:點擊規劃路徑圖標,在海圖上任意位置規劃航線,用於無人艇循跡;
第三步:點擊發送航線,即將航線發送至無人艇上;
第四步:點擊開始循跡,此時若已設置一定油門,無人艇開始運動,一定注意觀察無人艇是否按照航線運動,如出現異常,再次點擊該按鈕,即可停船。 第五步:設置油門值,併發送。無人艇首次上電或重啓時,油門值默認爲0,需要設置油門(0~100,最好不要超過80,觀察轉速和航速是否滿足要求),後續循跡時該油門一直保持設定值,無需每次循跡都要設置。
1)每次只能使用一條航跡,因此,只能將HYPACK佈置好的測線文件作爲背景,然後現場做航跡,一條一條的跑
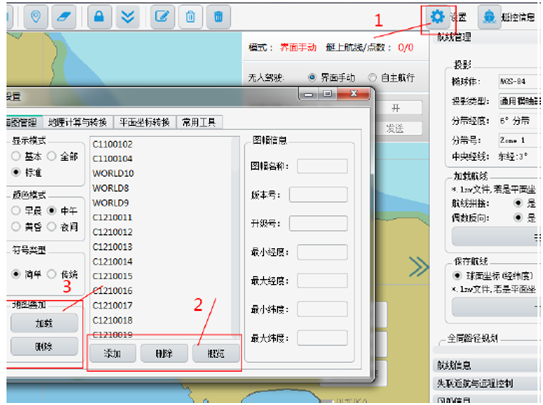
背景文件的製作和使用:
2)導航軟件軟件支持UTM和高斯投影,先在HYPACK設置一個導航軟件的支持的帶,然後布好測線,保存爲lnw文件
導航軟件進行加載
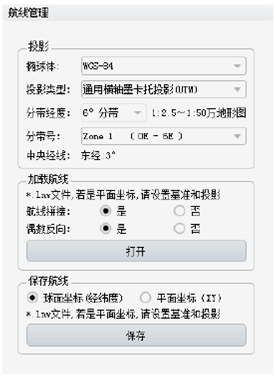
3)打開,就會在導航界面顯示,然後保存(一定要選經緯度座標,背景加載只支持經緯度座標)
在設置中的海圖管理,加載保存的文件,即可作爲背景文件
8、結束工作的順序
1)將這兩個軟件進行最小化,就可以不佔用無線帶寬,啓動以後,就開始記錄了
2)測量結束,關閉2個軟件的發射
3)船到岸邊或母船邊以後,關閉主機和發電機,一旦吊起,沒有冷卻水,會損壞主機和發電機
4)落錘,吊裝,船需要正好安裝在鐵架上
5)無人船接岸電,用網線直連sonar主機,拷貝數據
6)用遙控器關閉UPS,開關調到關,底層開關關閉
9、遇到的問題:
1、 無人船在岸上的時候,我的電腦不能遠程桌面sonar主機
檢查了MBR的第三方連接管理,我的電腦已經加入了,突然想起來,sonar的網線昨天被我拔掉了
遠程桌面有時無法連接,重啓電腦就可以,懷疑是遠程連接沒有正常關閉,後來嘗試了一下正式關閉,可以重新連接,不用重啓電腦
2、 sonar主機每次重啓的時候,都要進行時間同步,因爲如果不同步,默認是上次使用的時間
3.遙控可以控制無人船,正常轉向,加速,倒車都正常,但是電腦端不能進行:
發送油門信息,但是主機並沒有反應,轉速一直處於怠速(700-800)
可以發送航跡,也可以循航跡,但是由於由於沒有動力,不能循航跡
最後船都飄好遠,超過800m了,趕緊帶着遙控器離船近點,慢慢地將其遙控回來,否則得租船把它拖回來
與廠家遠程微信也不能解決,他們明天過來維修