




1、工控機未啓動
廠家胡博士和吳博士從中午開始維修,先是昨日的問題重現了一下,然後用自己的電腦再試一下,問題一樣,那麼問題肯定在船舶上;懷疑是工控機沒有啓動,重啓UPS,仍然有問題,打開中間的長方形大艙蓋,檢查工控機。用鍵盤和鼠標,連接到工控機,發現是工控機啓動一半卡住了,說是硬盤出問題,需要修復一下。
工控機啓動以後,電腦就可以控制船舶,發送油門和航跡正常,從狀態欄的轉速就可以看出,油門發送成功,但是狀態欄不能更新了油門參數,油門一直是0.0%。胡博士將激光雷達的開關功能放在主界面上了,但是仍然有一個問題:比如,如果激光雷達關閉的時候,尚有故障,那麼這個故障就不能清除;爲了保證激光雷達的正常,可以先退到沒有障礙物的水域,然後關閉,就可以手動控制了。胡博士繼續解決激光雷達關閉以後,不能清除殘留障礙物的問題。
升級失敗,回退到昨天的狀態,爲了保證激光雷達的正常,可以先退到沒有障礙物的水域,然後關閉,就可以手動控制了。開啓和關閉有一段延時,約1分鐘。
2、一切正常
設備總算一切正常,開始幹活。

3、擱淺
由於測區北邊和天線之間有個岬角,中間還搬了一次家,搬到岬角上。
今天測岸邊的時候,不小心上礁石堆裏了,回來的時候,發現有些損壞,所以最好在天氣好的時候幹,即使碰到什麼東西或者擱淺,也不會有什麼危險。

和租船的人要了滑石粉、樹脂、凝固劑和增強劑,準備補補船

4、尋找放船點
1) 最好是碼頭,吊車能過去
2) 離測區越近越好,不能超過10km
3) 天線與船之間沒有遮擋
跑了一下午,找了附近的大碼頭,但是離測區有8km,距離較遠,後來在防潮堤找了一個水閘,高潮的時候,還可以。但是低潮不行 。

這個地方只能是高潮進出,而兩個高潮之間的時間是12個小時,天肯定黑了,因此不可行,看來還是要走大碼頭,任何時候都能回來。 現在就是距離較遠,必須租船將無人船拉到測區,然後用電腦控制,隨後在大碼頭附近找了一條船,約好明天早上6點出發

5、糟心的一天
今天早上將船從堤壩邊吊出去,然後用繩子牽到租船邊,拖到測區由於UPS只有在充電狀態下才能用遙控器啓動,這真是一個讓人無語的設定啊。後來,在岸上用發電機用電纜聯到船上,用遙控器啓動了UPS。現在想起來,這樣是不對的,步驟應該是這樣的:
1) 先在岸上將底層電池開關打開,與遙控器建立聯繫,如果不能,重啓開關
2) 然後將船吊裝至水中,將UPS充電打到船電
3) 遙控器啓動發電機
4) 遙控器啓動UPS(充電狀態下遙控器才能遙控啓動UPS)
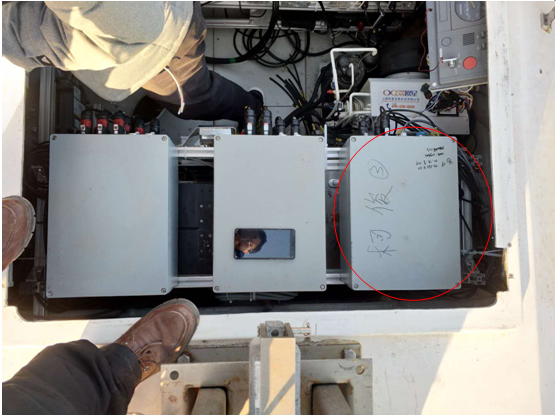
等潮水到了平潮,開始幹活,由於水比較淺,有的地方可能擱住了,不過大部分都趟過了,這樣會造成海底的垃圾纏繞至螺旋槳的主軸上,幹了約2小時後,通訊中斷,開船過去看了,發現發動機已經熄火了,冒着黑煙,而且將船艙都燻黑了,發動機的排煙管也壞了,發動機上的淡水箱也幹了,機艙裏也進了水,可能是從排煙口倒灌進去的,

發現之前船體碰壞的小地方滴答滴答的,上海大學說可能是船體玻璃鋼裏水滲出來的,不應該是船艙漏出來的。所幸的是發動機和發電機還能開啓,後來船廠溝通一下,需要大保養了我檢查了設備艙,也被燻黑了,UPS充電器故障,無法開機,查了多波束/聲納都沒有問題,看來明天必須用船拖着跑了,用外置發電機給設備通電,把活幹完。
6、處理效果
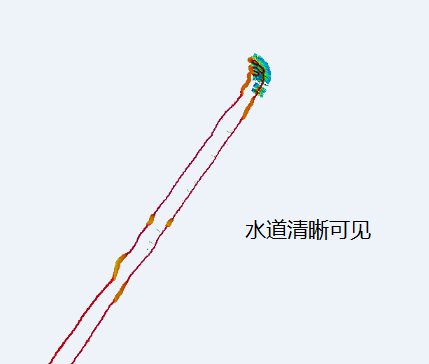
用caris軟件處理採集的多波束數據,比起單波束,多波束的效果非常明顯,比如下圖的潮汐水道在多波束上清晰可見,若是單波束還需要結合多條測線進行判斷,
無人船的多波束的主要問題是:生成的小格網(1-2m),波束的姿態不穩定,可能是無人船晃動的頻率快,而姿態數據更新不及時造成的,但是大格網(5-10m)效果還不錯,比如下圖:
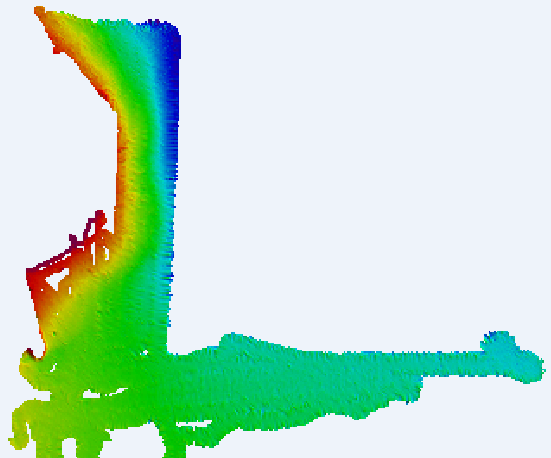
{kind=link}
7、總結
這次獨立操作無人船的經歷讓我們基本掌握了這款無人船的使用,教訓也比較深刻:以前我們碰到柴油機都躲着走,現在也要主動去了解它,會監控它的狀態,會根據情況作出合理的反應。在無人化和智能化的浪潮下,掌握和使用無人設備是我們海洋從業者必須具備的素質,不但要會使用,而且還要能參入進去,迎接新浪潮的洗禮。更多資訊見xiaok測繪網