




憑藉良好的性能,思嵐科技SLAMWARE模塊化自主定位導航已廣泛應用於各個領域,但在實際使用中仍會遇到一些特殊情況,使機器人出現導航效果不佳或建圖不好的問題,本文將以常見案例場景爲例,給出相應的解決方案供大家參考使用。
一、無明顯特徵的長走廊
酒店長廊、商場長廊,辦公室長廊都是日常生活中常見的場景,這些長廊沒有明顯的特徵,會造成機器人在長走廊上運動的時候,出現建圖和定位錯誤。
在遇到上述無明顯特徵的長走廊時:
1.在長廊中擺放一些綠植,可以有效改善定位建圖出現偏差的情況。但是這裏,花盆的表面最好爲啞光高反表面。

2.將走廊側壁特徵化
對於走廊側壁可探測的(滿足雷達探測要求),可以採用黑色飾面每隔3~4m劃一個30cm左右的不可探測區。
對於走廊側壁本身不可探測的,可以採用上述“鏡面反射表面或玻璃”中描述的方法來轉換成可探測表面,再每隔3~4m保留一段大約30cm的不可探測區。
二、玻璃鏡面反射,表面拋光、光滑的牆面…
在遇到上述玻璃鏡面、光滑牆面等情況時,建議着重做以下幾個處理:
1.直接對鏡面反射的材料做磨砂處理,可顯著改善雷達響應,提高可測量距離;
2.在材料表面直接粘貼標準的高反啞光膠帶,可顯著改善雷達測不到的問題;

3.在材料表面貼磨砂膜(此解決方案僅在雷達較近的範圍內有效,大約3m);

4.利用廣告噴繪膠帶提升測距極限值;
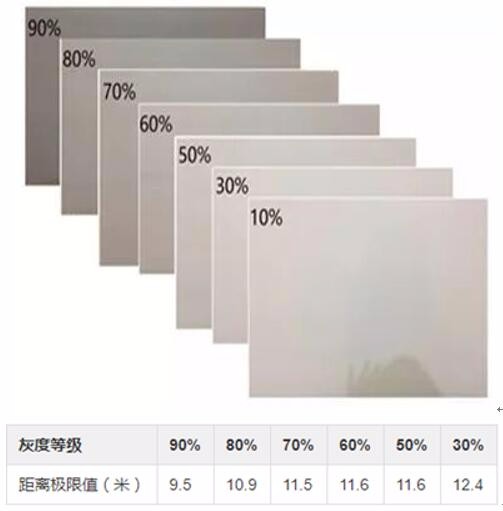
上述這些區域不需要非常規則,可以視實施場地情況做一定的調整,只要保證每過一段區域都有特徵即可。
……
如果你在部署過程中遇到了定位建圖有偏差的情況時,不妨對號入座,嘗試着用上述解決方案解決一下。