




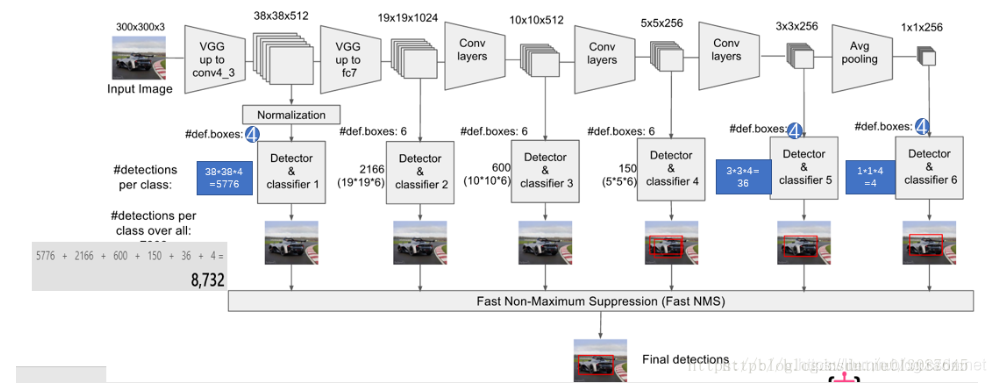
SSD: Single Shot MultiBox Detector
論文鏈接:https://arxiv.org/pdf/1512.02325.pdf
Pytorch代碼:https://github.com/shanglianlm0525/ObjectDetection-network
Pytorch代碼:
import torch
import torch.nn as nn
import torchvision
import cv2
def Conv3x3BNReLU(in_channels,out_channels,stride,padding=1):
return nn.Sequential(
nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=3, stride=stride, padding=padding),
nn.BatchNorm2d(out_channels),
nn.ReLU6(inplace=True)
)
def Conv3x3ReLU(in_channels,out_channels,stride,padding=1):
return nn.Sequential(
nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=3, stride=stride, padding=padding),
nn.ReLU6(inplace=True)
)
def ConvTransBNReLU(in_channels,out_channels,kernel_size,stride):
return nn.Sequential(
nn.ConvTranspose2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size, stride=stride, padding=kernel_size//2),
nn.BatchNorm2d(out_channels),
nn.ReLU6(inplace=True)
)
def Conv1x1BNReLU(in_channels,out_channels):
return nn.Sequential(
nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=1, stride=1),
nn.BatchNorm2d(out_channels),
nn.ReLU6(inplace=True)
)
def Conv1x1BN(in_channels,out_channels):
return nn.Sequential(
nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=1, stride=1),
nn.BatchNorm2d(out_channels)
)
class SSD(nn.Module):
def __init__(self, phase='train', num_classes=21):
super(SSD, self).__init__()
self.phase = phase
self.num_classes = num_classes
self.detector1 = nn.Sequential(
Conv3x3BNReLU(in_channels=3, out_channels=64, stride=1),
Conv3x3BNReLU(in_channels=64, out_channels=64, stride=1),
nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True),
Conv3x3BNReLU(in_channels=64, out_channels=128, stride=1),
Conv3x3BNReLU(in_channels=128, out_channels=128, stride=1),
nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True),
Conv3x3BNReLU(in_channels=128, out_channels=256, stride=1),
Conv3x3BNReLU(in_channels=256, out_channels=256, stride=1),
Conv3x3BNReLU(in_channels=256, out_channels=256, stride=1),
nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True),
Conv3x3BNReLU(in_channels=256, out_channels=512, stride=1),
Conv3x3BNReLU(in_channels=512, out_channels=512, stride=1),
Conv3x3BNReLU(in_channels=512, out_channels=512, stride=1),
)
self.detector2 = nn.Sequential(
nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True),
Conv3x3BNReLU(in_channels=512, out_channels=512, stride=1),
Conv3x3BNReLU(in_channels=512, out_channels=512, stride=1),
Conv3x3BNReLU(in_channels=512, out_channels=512, stride=1),
nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True),
ConvTransBNReLU(in_channels=512, out_channels=1024, kernel_size=3, stride=2),
Conv1x1BNReLU(in_channels=1024, out_channels=1024),
)
self.detector3 = nn.Sequential(
Conv1x1BNReLU(in_channels=1024, out_channels=256),
Conv3x3BNReLU(in_channels=256, out_channels=512, stride=2),
)
self.detector4 = nn.Sequential(
Conv1x1BNReLU(in_channels=512, out_channels=128),
Conv3x3BNReLU(in_channels=128, out_channels=256, stride=2),
)
self.detector5 = nn.Sequential(
Conv1x1BNReLU(in_channels=256, out_channels=128),
Conv3x3ReLU(in_channels=128, out_channels=256, stride=1, padding=0),
)
self.detector6 = nn.Sequential(
Conv1x1BNReLU(in_channels=256, out_channels=128),
Conv3x3ReLU(in_channels=128, out_channels=256, stride=1, padding=0),
)
self.loc_layer1 = nn.Conv2d(in_channels=512, out_channels=4 * 4, kernel_size=3, stride=1, padding=1)
self.conf_layer1 = nn.Conv2d(in_channels=512, out_channels=4 * num_classes, kernel_size=3, stride=1, padding=1)
self.loc_layer2 = nn.Conv2d(in_channels=1024, out_channels=6 * 4, kernel_size=3, stride=1, padding=1)
self.conf_layer2 = nn.Conv2d(in_channels=1024, out_channels=6 * num_classes, kernel_size=3, stride=1, padding=1)
self.loc_layer3 = nn.Conv2d(in_channels=512, out_channels=6 * 4, kernel_size=3, stride=1, padding=1)
self.conf_layer3 = nn.Conv2d(in_channels=512, out_channels=6 * num_classes, kernel_size=3, stride=1, padding=1)
self.loc_layer4 = nn.Conv2d(in_channels=256, out_channels=6 * 4, kernel_size=3, stride=1, padding=1)
self.conf_layer4 = nn.Conv2d(in_channels=256, out_channels=6 * num_classes, kernel_size=3, stride=1, padding=1)
self.loc_layer5 = nn.Conv2d(in_channels=256, out_channels=4 * 4, kernel_size=3, stride=1, padding=1)
self.conf_layer5 = nn.Conv2d(in_channels=256, out_channels=4 * num_classes, kernel_size=3, stride=1, padding=1)
self.loc_layer6 = nn.Conv2d(in_channels=256, out_channels=4 * 4, kernel_size=3, stride=1, padding=1)
self.conf_layer6 = nn.Conv2d(in_channels=256, out_channels=4 * num_classes, kernel_size=3, stride=1, padding=1)
if self.phase == 'test':
self.softmax = nn.Softmax(dim=-1)
elif self.phase == 'train':
for m in self.modules():
if isinstance(m, nn.Conv2d):
if m.bias is not None:
nn.init.xavier_normal_(m.weight.data)
nn.init.constant_(m.bias, 0)
else:
nn.init.xavier_normal_(m.weight.data)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def forward(self, x):
feature_map1 = self.detector1(x)
feature_map2 = self.detector2(feature_map1)
feature_map3 = self.detector3(feature_map2)
feature_map4 = self.detector4(feature_map3)
feature_map5 = self.detector5(feature_map4)
out = feature_map6 = self.detector6(feature_map5)
loc1 = self.loc_layer1(feature_map1)
conf1 = self.conf_layer1(feature_map1)
loc2 = self.loc_layer2(feature_map2)
conf2 = self.conf_layer2(feature_map2)
loc3 = self.loc_layer3(feature_map3)
conf3 = self.conf_layer3(feature_map3)
loc4 = self.loc_layer4(feature_map4)
conf4 = self.conf_layer4(feature_map4)
loc5 = self.loc_layer5(feature_map5)
conf5 = self.conf_layer5(feature_map5)
loc6 = self.loc_layer6(feature_map6)
conf6 = self.conf_layer6(feature_map6)
locs = torch.cat([loc1.permute(0, 2, 3, 1).contiguous().view(loc1.size(0), -1),
loc2.permute(0, 2, 3, 1).contiguous().view(loc2.size(0), -1),
loc3.permute(0, 2, 3, 1).contiguous().view(loc3.size(0), -1),
loc4.permute(0, 2, 3, 1).contiguous().view(loc4.size(0), -1),
loc5.permute(0, 2, 3, 1).contiguous().view(loc5.size(0), -1),
loc6.permute(0, 2, 3, 1).contiguous().view(loc6.size(0), -1)], dim=1)
confs = torch.cat([conf1.permute(0, 2, 3, 1).contiguous().view(conf1.size(0), -1),
conf2.permute(0, 2, 3, 1).contiguous().view(conf2.size(0), -1),
conf3.permute(0, 2, 3, 1).contiguous().view(conf3.size(0), -1),
conf4.permute(0, 2, 3, 1).contiguous().view(conf4.size(0), -1),
conf5.permute(0, 2, 3, 1).contiguous().view(conf5.size(0), -1),
conf6.permute(0, 2, 3, 1).contiguous().view(conf6.size(0), -1)], dim=1)
if self.phase == 'test':
out = (locs.view(locs.size(0), -1, 4),
self.softmax(confs.view(confs.size(0), -1,self.num_classes)))
else:
out = (locs.view(locs.size(0), -1, 4),
confs.view(confs.size(0), -1, self.num_classes))
return out
if __name__ == '__main__':
model = SSD()
print(model)
input = torch.randn(1,3,300,300)
output = model(input)
print(output[0].shape)
print(output[1].shape)