




最近硬件四轴很火,了解了很久,还是选择了MiniFly,主要还是资料多,后边可以有人讨论,不像很多就是建了个群,研究问题还是在论坛方便很多。
四轴终于拿到手,功能很强大,主要是还支持二次开发,可以研究下玩玩小四轴了
还是先从硬件入手分析下
1.系统框架
主体可以分成两个小系统,后续可以按照这个顺序分析代码
1.通信部分---基于M0和NFR51822,包括电源管理
2.控制部分---基于M4和外围传感器
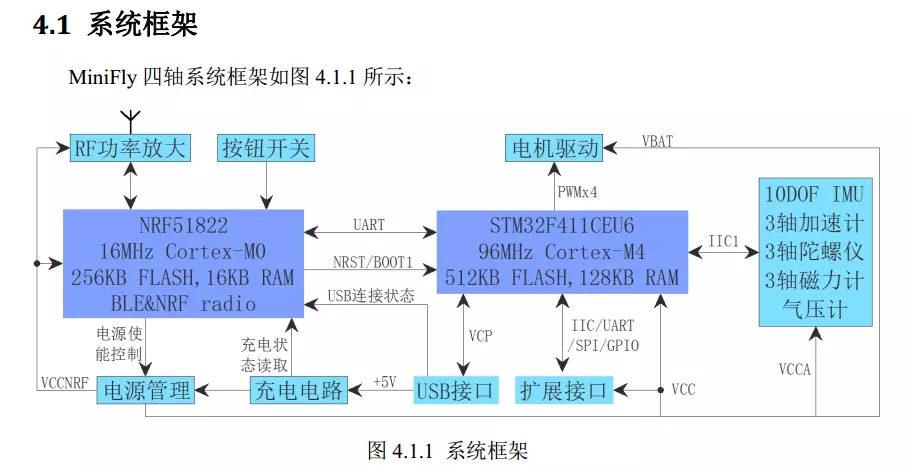
image.png
2.比较关注的电源部分
电源还是比较考究,直接包含了充电功能,不用每次使用外置的充电模块(之前自制过一个充电模块,看来以后可以集成到电路里了)
按键断电功能这个比较喜欢:这个是NFR51822控制VEN_D引脚来实现断电的
上个NFR51822部分电路
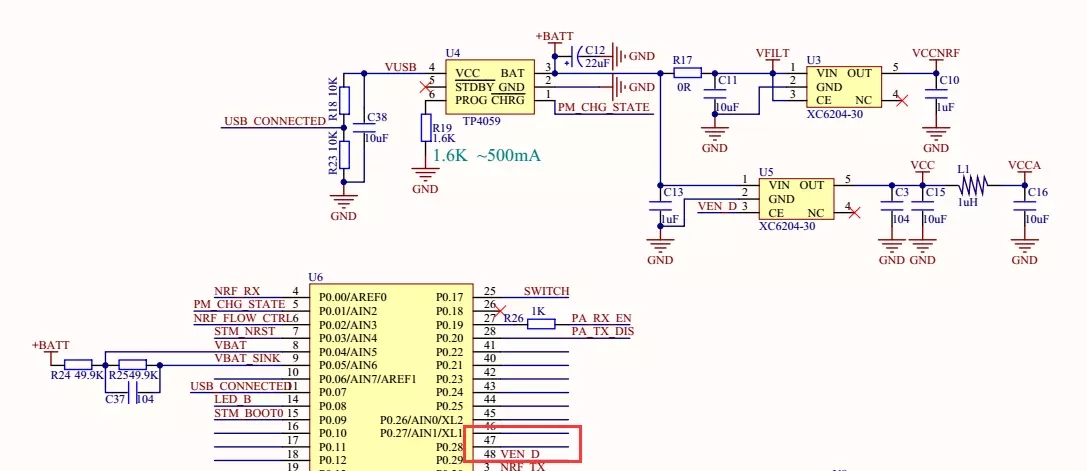
image.png
开始看代码,大致看了下程序,先是监测按键状态
/*按键扫描处理*/
void buttonProcess()
{
static unsigned int lastTick;
static unsigned int pressedTick;
static bool pressed = false;
if (lastTick != systickGetTick())
{
lastTick = systickGetTick();
if(pressed==false && BUTTON_READ()==BUTTON_PRESSED)
{
pressed = true;
pressedTick = systickGetTick();
}
else if(pressed==true)
{
if(BUTTON_READ()==BUTTON_RELEASED)
pressed = false;
if ((systickGetTick()-pressedTick) > BUTTON_LONGPRESS_TICK)
state = buttonLongPress;
else if(BUTTON_READ()==BUTTON_RELEASED)
state = buttonShortPress;
}
}
}
/*获取按键状态*/
buttonEvent_e buttonGetState()
{
buttonEvent_e currentState = state;
state = buttonIdle;
return currentState;
}
然后就是在主函数中进行相应的操作,先不说了
看下怎么实现电源开关的:这么最后应该F1部分还是有电的,只是消耗较少,寻求一种可以完全断电的方案??
/*开启电源*/
void pmPowerOn(void)
{
nrf_gpio_cfg_output(UART_TX_PIN); //使能串口TX
nrf_gpio_pin_set(UART_TX_PIN);
nrf_gpio_cfg_output(RADIO_PAEN_PIN);// 开启无线功能
nrf_gpio_pin_set(RADIO_PAEN_PIN);
nrf_gpio_cfg_output(PM_VBAT_SINK_PIN);// 设置ADC
nrf_gpio_pin_clear(PM_VBAT_SINK_PIN);
pmStartAdc(); //开启ADC转换
}
/*关闭电源*/
void pmPowerOff(void)
{
nrf_gpio_cfg_input(UART_TX_PIN, NRF_GPIO_PIN_PULLDOWN);
uartDeinit();
nrf_gpio_cfg_input(STM_NRST_PIN, NRF_GPIO_PIN_PULLDOWN);
nrf_gpio_pin_clear(STM_NRST_PIN);
nrf_gpio_pin_clear(PM_VCCEN_PIN); //关闭 LDO使能控制脚
LED_OFF();
nrf_gpio_pin_clear(RADIO_PAEN_PIN); //关闭PA
nrf_gpio_cfg_input(PM_VBAT_SINK_PIN, NRF_GPIO_PIN_NOPULL);
NRF_POWER->SYSTEMOFF = 1UL;
while(1); //进入死循环
}
void pmInit()
{
/* STM32 电源配置 */
nrf_gpio_cfg_output(PM_VCCEN_PIN);
nrf_gpio_pin_set(PM_VCCEN_PIN); //使能stm32电源
msDelay(100);
/* STM32 复位 */
nrf_gpio_cfg_output(STM_NRST_PIN);
nrf_gpio_pin_clear(STM_NRST_PIN);
msDelay(100);
nrf_gpio_pin_set(STM_NRST_PIN);
msDelay(100);
nrf_gpio_cfg_input(USB_CONNECTED_PIN, NRF_GPIO_PIN_NOPULL);
nrf_gpio_cfg_input(PM_CHG_STATE_PIN, NRF_GPIO_PIN_PULLUP);
pmPowerOn(); //开启电源
}
最后也是给大家分享一些四轴和stm32方面的资料方便后期的学习参考
四轴飞行器开发:makeru.com.cn/course/details/2986?s=45051