




本文將主要介紹 標準的 8bit BT656(4:2:2)YCbCr SDTV(標清) 數字視頻信號格式
1. 幀的概念(Frame)
一個視頻序列是由N個幀組成的,採集圖像的時候一般有2種掃描方式,一種是逐行掃描(progressive scanning),一種是隔行掃描(interlaced
scanning)。對於隔行掃描,每一幀一般有2個場(field),一個叫頂場(top field),一個叫底場(bottom field)。假設一幀圖像是720行,那麼,頂場就包含其中所有的偶數行,而底場則包含其中所有的奇數行。
2. 場的概念(field)
注意,上面提到頂場和底場,用的是“包含”二字,而不是說完全由後者組成,因爲在BT.656標準中,一個場是由三個部分組成的:
場 = 垂直消隱頂場(First Vertical Blanking) + 有效數據行(Active Video) + 垂直消隱底場(Second Vertical Blanking)
對於頂場,有效數據行就是一幀圖像的所有偶數行,而底場,有效數據行就是一幀圖像的所有奇數行。頂場和底場的空白行的個數也有所不同,那麼,對於一個標準的 8bit BT656(4:2:2)SDTV(標清)的視頻而言,對於一幀圖像,其格式定義如下:

由上圖可以知道,對於PAL制式,每一幀有625行,其中,頂場有效數據288行,底場有效數據也是288行,其餘行即爲垂直消隱信號。爲什麼是288行?因爲PAL制式的SDTV或者D1的分辨率爲 720*576,即一幀有576行,故一場爲288行。
由上圖我們還可以知道,頂場有效數據的起始行爲第23行,底場有效數據的起始行爲第335行。
另外,上圖中的 F 標記奇偶場,V標記 是否爲垂直消隱信號。
3. 每一行的組成(Lines)
下面說明每一行的組成,一行是由4個部分組成:
行 = 結束碼(EAV) + 水平消隱(Horizontal Vertical Blanking) + 起始碼(SAV) + 有效數據(Active Video)
典型的一行數據組成如下圖所示:

起始碼(SAV)和結束碼(EAV),它是標誌着一行的開始結束的重要標記,也包含了其他的一些重要的信息,後面將會講到。
爲什麼水平消隱 是280字節,這個我暫時還沒搞清楚,不知道是不是標準定義的。
爲什麼一行中的有效數據是 1440 字節? 因爲PAL制式的SDTV或者D1的分辨率爲 720*576,即一行有720個有效點,由於採集的是彩色圖像,那麼一行就是由亮度信息(Y)和色差信息(CbCr)組成的,由於是 YCbCr422格式,故一行中有720列Y,720列CbCr,這樣,一行的有效字節數就自然爲 720 x 2 = 1440 字節了。
4. EAV和SAV
EAV和SAV都是4個字節(Bytes),由上面的圖可以知道,SAV後面跟着的就是有效的視頻數據了。那麼,EAV和SAV的格式是怎麼樣的呢?
EAV和SAV的4個字節的格式規定如下(下面以16進製表示):
FF 00 00 XY
其中,前三個字節爲固定的,必須是FF 00 00,而第4個字節(XY)是根據場、消隱信息而定的,其8個bit含義如下: 1 F V H P3 P2 P1 P0
其中,F:標記場信息,傳輸頂場時爲0,傳輸底場時爲1
V:標記消隱信息,傳輸消隱數據時爲1,傳輸有效視頻數據時爲0
H:標記EAV還是SAV,SAV爲0,EAV爲1
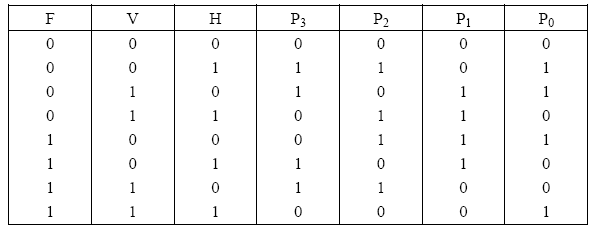
而 P0~P3爲保護比特,其值取決於F、H、V,起到校驗的作用,計算方法如下:
5. 總結
這篇文章僅僅講了BT.656格式中最基本的一些概念,權當入門,許多視頻採集芯片都會涉及這方面的知識。如有疑問,歡迎留言討論。最後,感謝《A Brief Introduction to Digital Video》這篇英文文章對BT.656的介紹,寫得很不錯,我基本上根據它瞭解BT656和寫這篇文章的,有興趣的童鞋可以看看。
—————————————————————————————————————————————————————————
以下轉自特權博客http://www.eefocus.com/ilove314/blog/11-09/231422_89195.html
ITU-RBT.656視頻標準接口
ITU-RBT.656視頻標準接口PAL制式(720*576)每場由四部分組成。
● 有效視頻數據,分爲奇場和偶場,均由288行組成。每行有1440個字節,其中720個字節爲Y分量,360個字節爲Cb分量,360個字節爲Cr分量。Y分量的取值爲16~235;Cb和Cr分量的取值爲16~240。
● 水平消隱,有280個字節。
● 垂直消隱。
● 控制字。
對於有效數據行,其格式如圖1所示。EAV和SAV爲嵌入式控制字,分別表示有效視頻的終點和起點。EAV和SAV均爲4個字節構成,前3個字節FF、00、00爲固定頭,“XY”爲控制字。“XY”的8個bit含義如下:
● Bit7(Const),常數,總爲1。
● Bit6(F),場同步信號,表示該行數據處於奇場還是偶場。
● Bit5(V),垂直同步信號,表示處於場消隱區間還是正程區間(有效數據行)。
● Bit4(H),水平同步信號,表示是“SAV”還是“EAV”。
● Bit3-0(P3P2P1P0),糾錯位。P3=V(XOR)H;P2=F(XOR)H;P1=F(XOR)V;P0=F(XOR)V(XOR)H。
EAV與SAV的詳細定義如表1所示。
表1
|
Bit7 |
Bit6 |
Bit5 |
Bit4 |
Bit3-0(P3P2P1P0) |
Hex |
Description |
|
1 |
0 |
0 |
0 |
0000 |
0x80 |
Even,Active,SAV |
|
1 |
0 |
0 |
1 |
1101 |
0x9d |
Even, Active,EAV |
|
1 |
0 |
1 |
0 |
1011 |
0xab |
Even,Blank, SAV |
|
1 |
0 |
1 |
1 |
0110 |
0xb6 |
Even, Blank, EAV |
|
1 |
1 |
0 |
0 |
0111 |
0xc7 |
Odd, Active, SAV |
|
1 |
1 |
0 |
1 |
1010 |
0xda |
Odd, Active, EAV |
|
1 |
1 |
1 |
0 |
1100 |
0xec |
Odd, Blank, SAV |
|
1 |
1 |
1 |
1 |
0001 |
0xf1 |
Odd, Blank, EAV |
Blanking爲水平消隱區,通常由80H/10H來填充。

圖1
對於圖1中的Valid data(有效數據)區,其數據排列順序如圖2所示。即Y : Cb : Cr="4" : 2 : 2。從圖像的像素點上來理解,就是每個像素點有一個單獨的Y值,而相鄰的兩個像素點的Cb和Cr數據是一樣的。

圖2
PAL一場的數據行格式如圖3所示。

圖3
工程實踐中就是通過EAV和SAV對行、場信息進行檢測,分離出有效數據。而EAV和SAV的差別只在控制字XY數據有別。因此表2對控制字XY和行、場之間的關係做了映射,並且理論上控制字XY數據流也是按照表2的上到下、左到右的順序出現的。但是在實際工程中,特權同學發現奇場和偶場的順序好像和這裏的定義剛好反了。
表2
|
行數 |
F |
V |
EAV |
SAV |
|
1~22 |
0 |
1 |
0xb6 |
0xab |
|
23~310 |
0 |
0 |
0x9d |
0x80 |
|
311~312 |
0 |
1 |
0xb6 |
0xab |
|
313~335 |
1 |
1 |
0xf1 |
0xec |
|
336~623 |
1 |
0 |
0xda |
0xc7 |
|
624~625 |
1 |
1 |
0xf1 |
0xec |

