本文主要描述了在android2.3平臺G-sensor相關軟硬件的體系架構和實現原理,按照Applications、Framework、HAL、Driver和Hardware五大層次分別介紹。
1.系統架構 (Architecture)
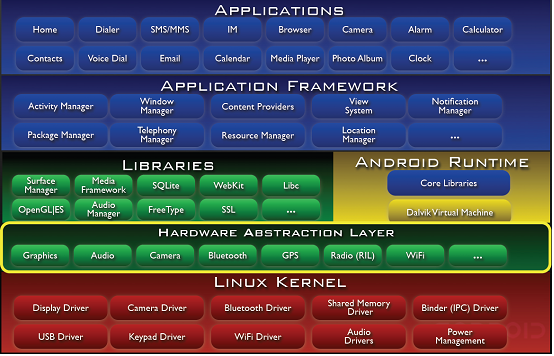
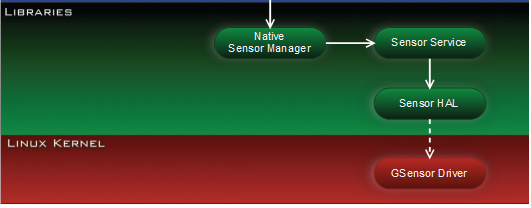
1.1 Android體系架構圖
1.2 Sensor子系統架構圖
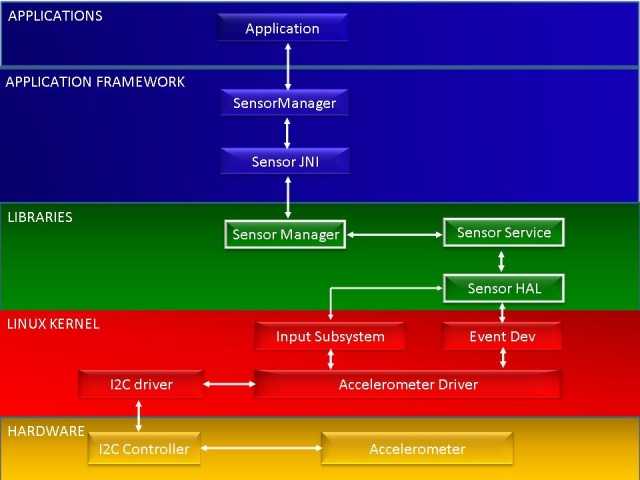
· Application Framework
Sensor應用程序通過Sensor應用框架來獲取sensor數據,應用框架層的Sensor Manager通過JNI與C++層進行通信。
· Sensor Libraries
Sensor中間層主要由Sensor Manager、Sensor service和Sensor硬件抽象層組成。
· Input Subsystem
通用的Linux輸入框架專爲與鍵盤、鼠標和觸摸屏等輸入設備而設計,並定義了一套標準事件集合。Sensor輸入子系統採用採用了通用的Linux輸入框架,它通過/sys/class/input節點和用戶空間進行交互。
· Event Dev
Evdev提供了一種訪問/dev/input/eventX輸入設備事件的通用方法。
· AccelerometerDriver
此驅動通過SIRQ和I2C總線與MMA7660模組進行通信。SIRQ用來產生傳感器事件中斷。
2 應用 (Applications)
2.1 應用開發五步曲
(1) 獲取傳感器管理器對象;
mSensorManager =(SensorManager) getSystemService(SENSOR_SERVICE);
(2) 獲取傳感器對象;
mSensor = mSensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
(3) 定義事件監聽器;
mEventListener =new SensorEventListener() {
[java] view plaincopyprint?
@Override
publicvoid onSensorChanged(SensorEvent event) {
float[] values = event.values;
mTextView.setText("Accelerometer:" + values[0] +", "
+ values[1] +", " + values[2]);
}
@Override
publicvoidonAccuracyChanged(Sensor sensor,int accuracy) {
}
@Override
publicvoid onSensorChanged(SensorEvent event) {
float[] values = event.values;
mTextView.setText("Accelerometer:" + values[0] +", "
+ values[1] +", " + values[2]);
}
@Override
publicvoidonAccuracyChanged(Sensor sensor,int accuracy) {
}
};
(4) 註冊事件監聽器;
protectedvoid onResume() {
[java] view plaincopyprint?
super.onResume();
mSensorManager.registerListener(mEventListener, mSensor,
SensorManager.SENSOR_DELAY_NORMAL);
super.onResume(); mSensorManager.registerListener(mEventListener, mSensor, SensorManager.SENSOR_DELAY_NORMAL); }
(5) 卸載事件監聽器;
protectedvoid onPause() {
[java] view plaincopyprint?
super.onPause();
mSensorManager.unregisterListener(mEventListener);
}
super.onPause(); mSensorManager.unregisterListener(mEventListener); }
3 框架 (Framework)
3.1 工作模型
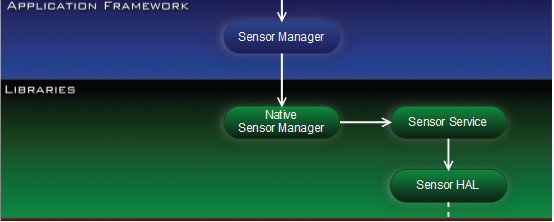
3.1.1 SensorManager的創建
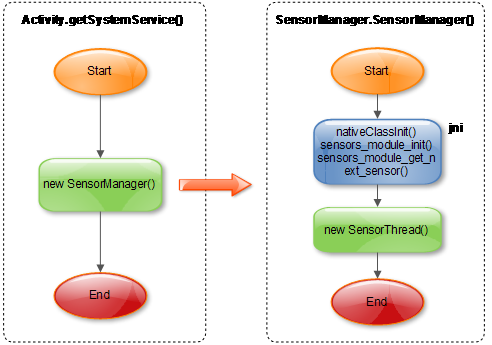
nativeClassInit(): 初始化Native類信息;
sensors_module_init(): 創建Native SensorManager實例,從SensorService讀取Sensor設備列表;
sensors_module_get_next_sensor(): 從SensorService讀取下一個Sensor設備;
3.1.2 SensorThread數據接收處理
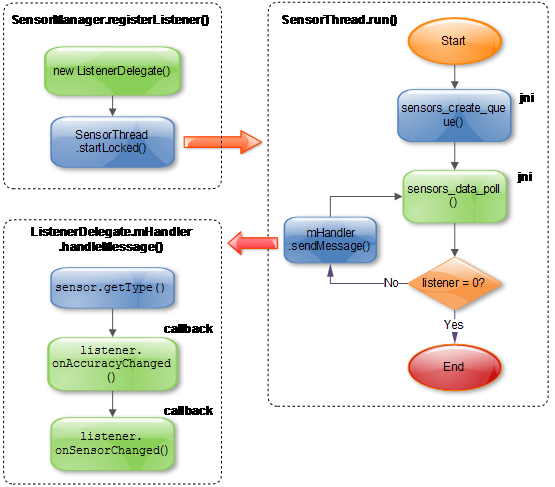
sensors_create_queue(): 創建和SensorService共享的消息隊列;
sensors_data_poll(): 從消息隊列中讀取SensorService發過來的消息;
3.1.3 SensorService的工作原理
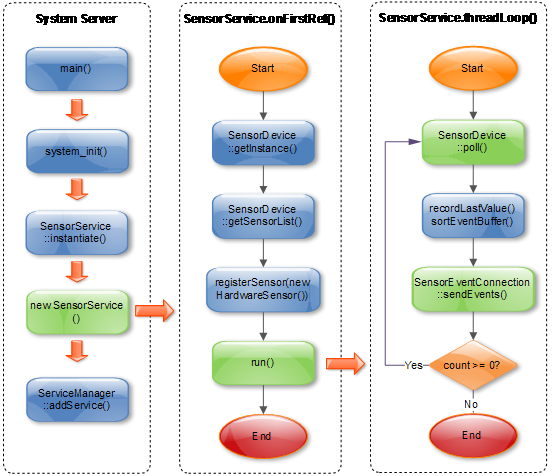
SensorDevice::poll(): 調用HAL接口讀取數據;
SensorEventConnection::sendEvents(): 往消息隊列中寫入消息,SensorThread後續會讀取該消息;
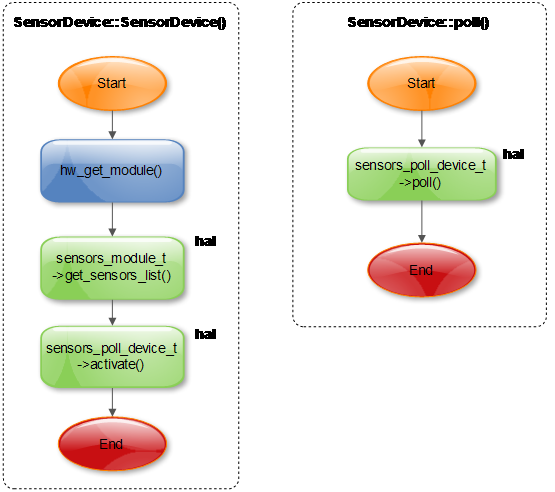
3.1.4 SensorDevice對HAL的訪問
4 硬件抽象層 (HAL)
在linux操作系統中,應用同硬件之間的交互都是通過設備驅動來實現,Android系統爲了降低應用開發人員開發難度,屏蔽硬件差異,定義出硬件抽象層,爲開發人員提供獲取各種設備相關的信息的接口。
4.1 Sensors HAL關鍵流程
4.1.1 打開Sensor設備
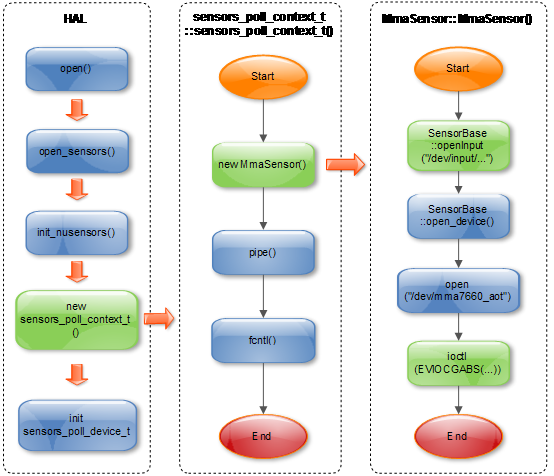
SensorBase ::openInput() : 打開input子系統的sensor消息文件句柄;
ioctl(EVIOCGABS(...)) : 獲取ABS_X/ABS_Y/ABS_Z的加速度;
4.1.2 輪循Sensor事件
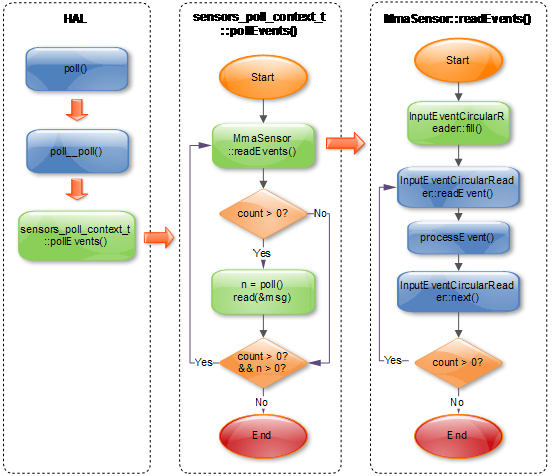
InputEventCircularReader::fill(): 調用read()從input子系統中讀取事件放入環形緩衝區;
InputEventCircularReader::readEvent(): 從環形緩衝區中讀取事件;
InputEventCircularReader::next(): 移動環形緩衝區當前指針;
5.2 Sensors HAL關鍵數據結構
5.2.1 sensors_module_t
[cpp] view plaincopyprint?
struct sensors_module_t {
struct hw_module_t common;
/**
* Enumerate all available sensors. The list is returned in "list".
* @return number of sensors in the list
*/
int (*get_sensors_list)(struct sensors_module_t* module,
struct sensor_t const** list);
};
struct sensors_module_t {
struct hw_module_t common;
/**
* Enumerate all available sensors. The list is returned in "list".
* @return number of sensors in the list
*/
int (*get_sensors_list)(struct sensors_module_t* module,
struct sensor_t const** list);
};
hw_get_module()會加載HAL模塊,並返回HAL入口數據結構(hw_module_t)。HAL_MODULE_INFO_SYM默認是“HAL”,在hw_get_module中用dlsym獲取。
[cpp] view plaincopyprint?
const struct sensors_module_t HAL_MODULE_INFO_SYM = {
.common = {
.tag = HARDWARE_MODULE_TAG,
.version_major = 1,
.version_minor = 0,
.id = SENSORS_HARDWARE_MODULE_ID,
.name = "MMA7660 Sensors Module",
.author = "The Android Open Source Project",
.methods = &sensors_module_methods,
},
.get_sensors_list = sensors__get_sensors_list
};
const struct sensors_module_t HAL_MODULE_INFO_SYM = {
.common = {
.tag = HARDWARE_MODULE_TAG,
.version_major = 1,
.version_minor = 0,
.id = SENSORS_HARDWARE_MODULE_ID,
.name = "MMA7660 Sensors Module",
.author = "The Android Open Source Project",
.methods = &sensors_module_methods,
},
.get_sensors_list = sensors__get_sensors_list
};
5.2.2 hw_module_methods_t
static struct hw_module_methods_t sensors_module_methods = {
[cpp] view plaincopyprint?
.open = open_sensors
.open = open_sensors };
5.2.3 sensors_poll_context_t
[cpp] view plaincopyprint?
struct sensors_poll_context_t {
struct sensors_poll_device_t device; // must be first
sensors_poll_context_t();
~sensors_poll_context_t();
int activate(int handle, int enabled);
int setDelay(int handle, int64_t ns);
int pollEvents(sensors_event_t* data, int count);
int handleToDriver(int handle);
};
struct sensors_poll_context_t {
struct sensors_poll_device_t device; // must be first
sensors_poll_context_t();
~sensors_poll_context_t();
int activate(int handle, int enabled);
int setDelay(int handle, int64_t ns);
int pollEvents(sensors_event_t* data, int count);
int handleToDriver(int handle);
};
5.2.4 sensors_poll_device_t
[cpp] view plaincopyprint?
struct sensors_poll_device_t {
struct hw_device_t common;
int (*activate)(struct sensors_poll_device_t *dev,
int handle, int enabled);
int (*setDelay)(struct sensors_poll_device_t *dev,
int handle, int64_t ns);
int (*poll)(struct sensors_poll_device_t *dev,
sensors_event_t* data, int count);
};
struct sensors_poll_device_t {
struct hw_device_t common;
int (*activate)(struct sensors_poll_device_t *dev,
int handle, int enabled);
int (*setDelay)(struct sensors_poll_device_t *dev,
int handle, int64_t ns);
int (*poll)(struct sensors_poll_device_t *dev,
sensors_event_t* data, int count);
};
5.2.5 sensor_t
定義傳感器的基本參數。
[cpp] view plaincopyprint?
static const struct sensor_t sSensorList[] = {
{ "MMA7660 3-axis Accelerometer",
"Freescale Semiconductor",
1, SENSORS_HANDLE_BASE+ID_A,
SENSOR_TYPE_ACCELEROMETER, 3.0f*9.81f, (3.0f*9.81f)/64.0f, 0.35f, 0, { } },
};
static const struct sensor_t sSensorList[] = {
{ "MMA7660 3-axis Accelerometer",
"Freescale Semiconductor",
1, SENSORS_HANDLE_BASE+ID_A,
SENSOR_TYPE_ACCELEROMETER, 3.0f*9.81f, (3.0f*9.81f)/64.0f, 0.35f, 0, { } },
};[cpp] view plaincopyprint?
struct sensor_t {
const char* name;
const char* vendor;
int version;
int handle;
int type;
float maxRange;
float resolution;
float power;
int32_t minDelay;
void* reserved[8];
};
struct sensor_t {
const char* name;
const char* vendor;
int version;
int handle;
int type;
float maxRange;
float resolution;
float power;
int32_t minDelay;
void* reserved[8];
};6 驅動 (driver)
6.1 mma7660驅動框架
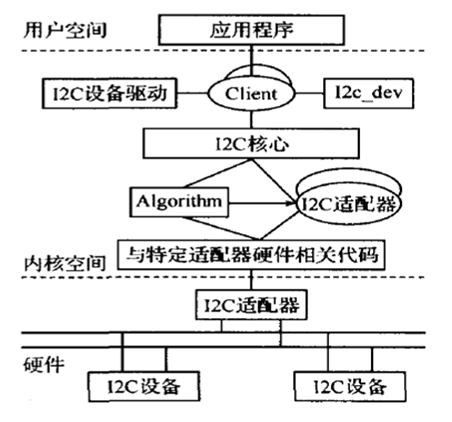
mma7660與主機通信是通過I2C接口,因此mma7660驅動程序採用Linux系統的I2C子系統框架來實現,主要由3部分組成:
(1) I2C核心
I2C核心提供了I2C總線驅動和設備驅動的註冊、註銷方法,I2C通信方法(即“algorithm”)上層的、與具體適配器無關的代碼以及探測設備、檢測設備地址的上層代碼等。這部分是與平臺無關的。
此部分在Linux內核的I2C驅動中實現,mma7660驅動使用其提供的功能接口來註冊設備驅動。
(2) I2C總線驅動
I2C總線驅動是對I2C硬件體系結構中適配器端的實現。I2C總線驅動主要包含了I2C適配器數據結構i2c_adapter、I2C適配器的algorithm數據結構i2c_algorithm和控制I2C適配器產生通信信號的函數。經由I2C總線驅動的代碼,我們可以控制I2C適配器以主控方式產生開始位、停止位、讀寫週期,以及以從設備方式被讀寫、產生ACK等。不同的CPU平臺對應着不同的I2C總線驅動。
此部分在Linux內核的I2C驅動中實現,mma7660驅動直接獲取其提供的adapter,並調用I2C核心的接口來註冊。
(3) I2C設備驅動
I2C設備驅動是對I2C硬件體系結構中設備端的實現。設備一般掛接在受CPU控制的I2C適配器上,通過I2C適配器與CPU交換數據。I2C設備驅動主要包含了數據結構i2c_driver和i2c_client,mma7660驅動需要實現其中的成員函數。
在Linux內核源代碼中的drivers目錄下的i2c_dev.c文件,實現了I2C適配器設備文件的功能,應用程序通過“i2c-%d”文件名並使用文件操作接口open()、write()、read()、ioctl()和close()等來訪問這個設備。應用層可以借用這些接口訪問掛接在適配器上的I2C設備的存儲空間或寄存器並控制I2C設備的工作方式。
6.2 mma7660操作流程
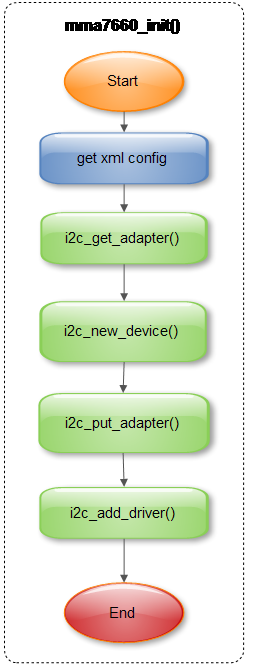
6.2.1 初始化
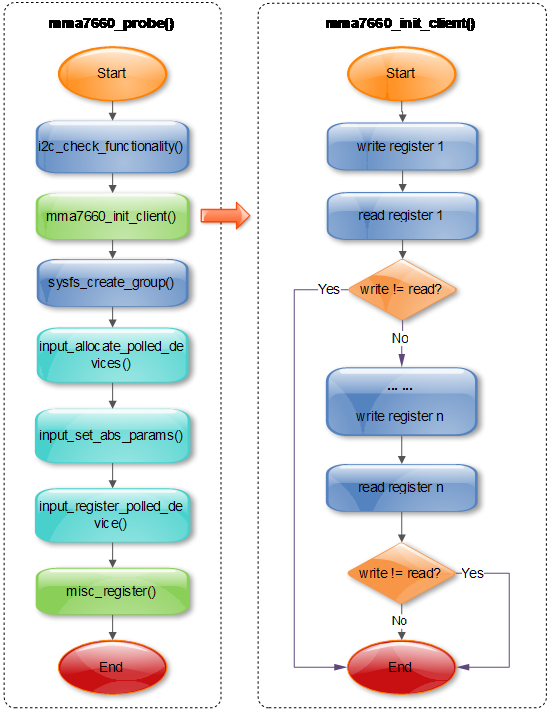
6.2.2 探測設備
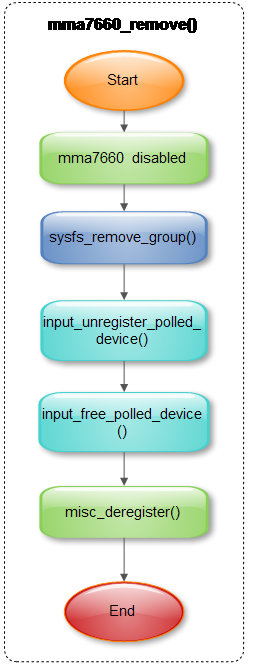
6.2.3 移除設備
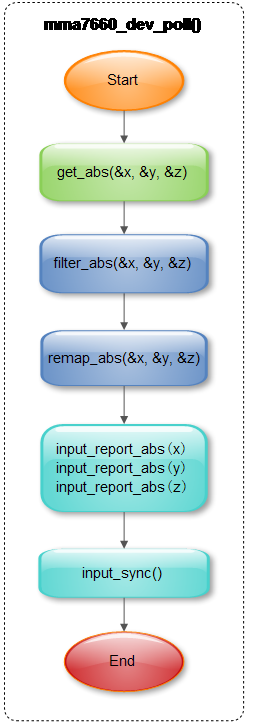
6.2.4 採集數據
6.2.5 睡眠和喚醒
Suspend處理:關閉mma7660模組;
Resume處理:使能mma7660模組;
[cpp] view plaincopyprint?
static int mma7660_suspend(struct i2c_client *client, pm_message_t mesg)
{
int result;
result = i2c_smbus_write_byte_data(client, MMA7660_MODE,
MK_MMA7660_MODE(0, 0, 0, 0, 0, 0, 0));
assert(result==0);
return result;
}
static int mma7660_resume(struct i2c_client *client)
{
int result;
result = i2c_smbus_write_byte_data(client, MMA7660_MODE,
MK_MMA7660_MODE(0, 1, 0, 0, 0, 0, 1));
assert(result==0);
return result;
}
static struct i2c_driver mma7660_driver = {
.driver = {
.name = MMA7660_DRV_NAME,
.owner = THIS_MODULE,
},
.class = I2C_CLASS_HWMON,
.suspend = mma7660_suspend,
.resume = mma7660_resume,
.probe = mma7660_probe,
.detect = mma7660_detect,
// .address_data = &addr_data,
.remove = __devexit_p(mma7660_remove),
.id_table = mma7660_id,
};
static int mma7660_suspend(struct i2c_client *client, pm_message_t mesg)
{
int result;
result = i2c_smbus_write_byte_data(client, MMA7660_MODE,
MK_MMA7660_MODE(0, 0, 0, 0, 0, 0, 0));
assert(result==0);
return result;
}
static int mma7660_resume(struct i2c_client *client)
{
int result;
result = i2c_smbus_write_byte_data(client, MMA7660_MODE,
MK_MMA7660_MODE(0, 1, 0, 0, 0, 0, 1));
assert(result==0);
return result;
}
static struct i2c_driver mma7660_driver = {
.driver = {
.name = MMA7660_DRV_NAME,
.owner = THIS_MODULE,
},
.class = I2C_CLASS_HWMON,
.suspend = mma7660_suspend,
.resume = mma7660_resume,
.probe = mma7660_probe,
.detect = mma7660_detect,
// .address_data = &addr_data,
.remove = __devexit_p(mma7660_remove),
.id_table = mma7660_id,
};6.3 命令行調試
6.3.1 sysfs調試接口
(1) 定義sysfs attribute相關數據結構;
[cpp] view plaincopyprint?
static SENSOR_DEVICE_ATTR(all_axis_force, S_IRUGO, show_xyz_force, NULL, 0);
static SENSOR_DEVICE_ATTR(x_axis_force, S_IRUGO, show_axis_force, NULL, 0);
static SENSOR_DEVICE_ATTR(y_axis_force, S_IRUGO, show_axis_force, NULL, 1);
static SENSOR_DEVICE_ATTR(z_axis_force, S_IRUGO, show_axis_force, NULL, 2);
static SENSOR_DEVICE_ATTR(orientation, S_IRUGO, show_orientation, NULL, 0);
static struct attribute* mma7660_attrs[] =
{
&sensor_dev_attr_all_axis_force.dev_attr.attr,
&sensor_dev_attr_x_axis_force.dev_attr.attr,
&sensor_dev_attr_y_axis_force.dev_attr.attr,
&sensor_dev_attr_z_axis_force.dev_attr.attr,
&sensor_dev_attr_orientation.dev_attr.attr,
NULL
};
static const struct attribute_group mma7660_group =
{
.attrs = mma7660_attrs,
};
static SENSOR_DEVICE_ATTR(all_axis_force, S_IRUGO, show_xyz_force, NULL, 0);
static SENSOR_DEVICE_ATTR(x_axis_force, S_IRUGO, show_axis_force, NULL, 0);
static SENSOR_DEVICE_ATTR(y_axis_force, S_IRUGO, show_axis_force, NULL, 1);
static SENSOR_DEVICE_ATTR(z_axis_force, S_IRUGO, show_axis_force, NULL, 2);
static SENSOR_DEVICE_ATTR(orientation, S_IRUGO, show_orientation, NULL, 0);
static struct attribute* mma7660_attrs[] =
{
&sensor_dev_attr_all_axis_force.dev_attr.attr,
&sensor_dev_attr_x_axis_force.dev_attr.attr,
&sensor_dev_attr_y_axis_force.dev_attr.attr,
&sensor_dev_attr_z_axis_force.dev_attr.attr,
&sensor_dev_attr_orientation.dev_attr.attr,
NULL
};
static const struct attribute_group mma7660_group =
{
.attrs = mma7660_attrs,
};
(2) 在probe函數中創建sysfs文件系統;
[cpp] view plaincopyprint?
result = sysfs_create_group(&client->dev.kobj, &mma7660_group);
if (result != 0) {
ERR("sysfs_create_group err\n");
goto exit_sysfs_creat_failed;
}
result = sysfs_create_group(&client->dev.kobj, &mma7660_group);
if (result != 0) {
ERR("sysfs_create_group err\n");
goto exit_sysfs_creat_failed;
}
(3) 實現sysfs屬性相關的讀寫函數;
[cpp] view plaincopyprint?
ssize_t show_orientation(struct device *dev, struct device_attribute *attr, char *buf)
{
int result;
u8 tilt, new_orientation;
mma7660_read_tilt(&tilt);
DBG("tilt [0x%x]\n", tilt);
new_orientation = tilt & 0x1f;
if (orientation!=new_orientation)
orientation = new_orientation;
switch ((orientation>>2)&0x07) {
case 1:
result = sprintf(buf, "Left\n");
break;
case 2:
result = sprintf(buf, "Right\n");
break;
case 5:
result = sprintf(buf, "Downward\n");
break;
case 6:
result = sprintf(buf, "Upward\n");
break;
default:
switch(orientation & 0x03) {
case 1:
result = sprintf(buf, "Front\n");
break;
case 2:
result = sprintf(buf, "Back\n");
break;
default:
result = sprintf(buf, "Unknown\n");
}
}
return result;
}
ssize_t show_orientation(struct device *dev, struct device_attribute *attr, char *buf)
{
int result;
u8 tilt, new_orientation;
mma7660_read_tilt(&tilt);
DBG("tilt [0x%x]\n", tilt);
new_orientation = tilt & 0x1f;
if (orientation!=new_orientation)
orientation = new_orientation;
switch ((orientation>>2)&0x07) {
case 1:
result = sprintf(buf, "Left\n");
break;
case 2:
result = sprintf(buf, "Right\n");
break;
case 5:
result = sprintf(buf, "Downward\n");
break;
case 6:
result = sprintf(buf, "Upward\n");
break;
default:
switch(orientation & 0x03) {
case 1:
result = sprintf(buf, "Front\n");
break;
case 2:
result = sprintf(buf, "Back\n");
break;
default:
result = sprintf(buf, "Unknown\n");
}
}
return result;
}[cpp] view plaincopyprint?
ssize_t show_xyz_force(struct device *dev, struct device_attribute *attr, char *buf)
{
int i;
s8 xyz[3];
for (i=0; i<3; i++)
mma7660_read_xyz(i, &xyz[i]);
return sprintf(buf, "(%d,%d,%d)\n", xyz[0], xyz[1], xyz[2]);
}
ssize_t show_axis_force(struct device *dev, struct device_attribute *attr, char *buf)
{
s8 force;
int n = to_sensor_dev_attr(attr)->index;
mma7660_read_xyz(n, &force);
return sprintf(buf, "%d\n", force);
}
ssize_t show_xyz_force(struct device *dev, struct device_attribute *attr, char *buf)
{
int i;
s8 xyz[3];
for (i=0; i<3; i++)
mma7660_read_xyz(i, &xyz[i]);
return sprintf(buf, "(%d,%d,%d)\n", xyz[0], xyz[1], xyz[2]);
}
ssize_t show_axis_force(struct device *dev, struct device_attribute *attr, char *buf)
{
s8 force;
int n = to_sensor_dev_attr(attr)->index;
mma7660_read_xyz(n, &force);
return sprintf(buf, "%d\n", force);
}
6.3.2 Gsensor調試實例
[plain] view plaincopyprint?
/sys/devices/platform/gl5201-i2c.1/i2c-1/1-004c # ls
uevent
name
modalias
subsystem
power
driver
all_axis_force
x_axis_force
y_axis_force
z_axis_force
orientation
input
/sys/devices/platform/gl5201-i2c.1/i2c-1/1-004c # cat all_axis_force
(-1,0,22)
/sys/devices/platform/gl5201-i2c.1/i2c-1/1-004c # ls uevent name modalias subsystem power driver all_axis_force x_axis_force y_axis_force z_axis_force orientation input /sys/devices/platform/gl5201-i2c.1/i2c-1/1-004c # cat all_axis_force (-1,0,22)
7 Hardware
7.1 mma7660模組
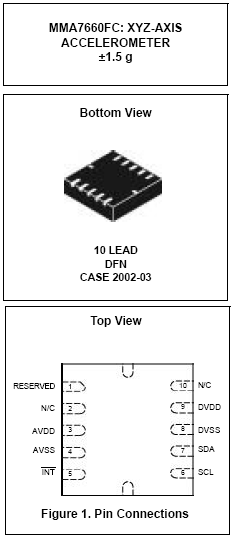
7.2 關鍵特性
Sampling Resolution: 6bit
Digital Output (I2C)
3mm x 3mm x 0.9mm DFN Package
Low Power Current Consumption:
Off Mode: 0.4 μA,
Standby Mode: 2 μA,
Active Mode: 47 μA at 1 ODR
Configurable Samples per Second from 1 to 120 samples
Low Voltage Operation:
Analog Voltage: 2.4 V - 3.6 V
Digital Voltage: 1.71 V - 3.6 V
Auto-Wake/Sleep Feature for Low Power Consumption
Tilt Orientation Detection for Portrait/Landscape Capability
Gesture Detection Including Shake Detection and Tap Detection
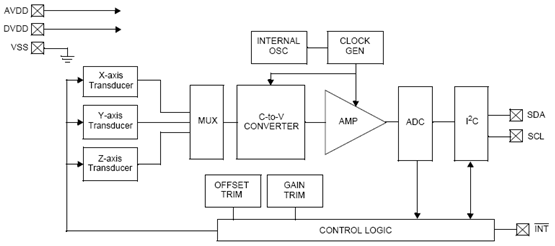
7.2.1 功能模塊圖
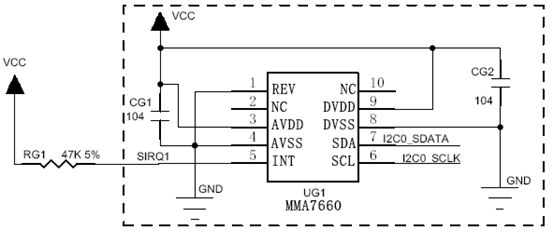
7.2.2 硬件連接圖
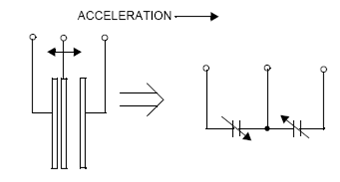
7.2.3 運動檢測原理
mma7660是一種電容式3軸g-sensor,其技術原理是在wafer的表面做出梳狀結構,當產生動作時,由偵測電容差來判斷變形量,反推出加速度的值。
簡單物理模型如下圖:
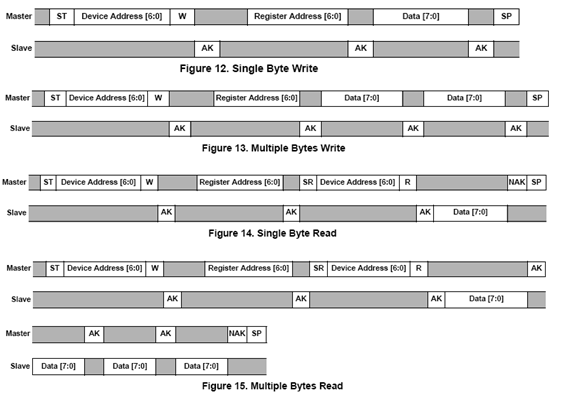
7.2.4 I2C讀寫時序
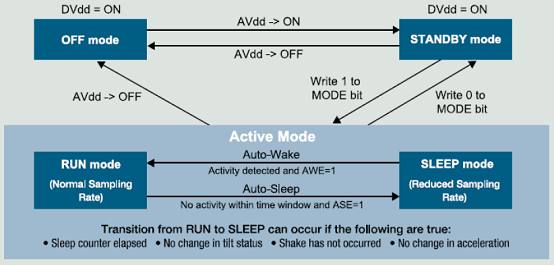
7.2.5 工作狀態機
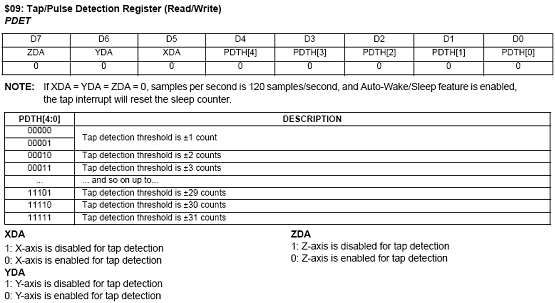
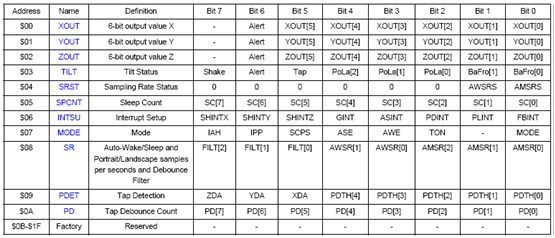
7.2.6 寄存器定義
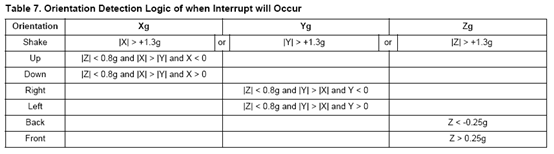
7.2.7 事件檢測
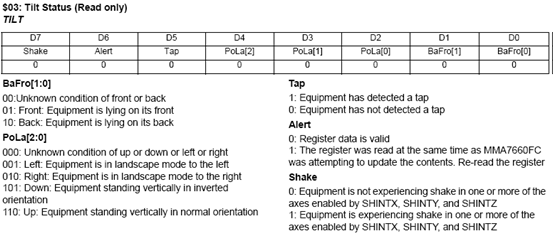
方向和搖動檢測
輕拍或傾斜檢測