




參考資料:
- Apollo代碼學習(六)—模型預測控制(MPC)
- Apollo代碼學習(五)—橫縱向控制
- Autoware 13.01相關組件
-
Jarrod M. Snider, "Automatic Steering Methods for Autonomous Automobile Path Tracking"
-
MATLAB課程(老師好看)
-
實驗demo:
因爲年底了需要讓小車泡泡。所以先以解析實際用到的開始,apollo可能有點來不及實現,接受程度相對不高,就以autoware爲模板吧。
autoware 之前一直以幾何預描點的形式解算,19年底加入了一些mpc模塊,代碼規範比較有參考意義

ros下運行節點圖

路點格式轉換(mpc_waypoints_converter )
如上圖描述,訂閱三個節點進行路點格式的轉換,/closest_waypoint、base_waypoints、final_waypoints,這些話題是由上層的局部路徑 規劃openplanner發佈的,一些接口格式需要進行一些轉換,僅此而已
pub_waypoints_ = nh_.advertise<autoware_msgs::Lane>("/mpc_waypoints", 1);
sub_closest_waypoint_ = nh_.subscribe("/closest_waypoint", 1, &MPCWaypointsConverter::callbackClosestWaypoints, this);
sub_base_waypoints_ = nh_.subscribe("/base_waypoints", 1, &MPCWaypointsConverter::callbackBaseWaypoints, this);
sub_final_waypoints_ = nh_.subscribe("/final_waypoints", 1, &MPCWaypointsConverter::callbackFinalWaypoints, this);
autoware_msgs::Lane mpc_waypoints;
mpc_waypoints.header = final_waypoints.header;
mpc_waypoints.increment = final_waypoints.increment;
mpc_waypoints.lane_id = final_waypoints.lane_id;
mpc_waypoints.lane_index = final_waypoints.lane_index;
mpc_waypoints.cost = final_waypoints.cost;
mpc_waypoints.closest_object_distance = final_waypoints.closest_object_distance;
mpc_waypoints.closest_object_velocity = final_waypoints.closest_object_velocity;
mpc_waypoints.is_blocked = final_waypoints.is_blocked;
---
//在base_waypoints中找到最近的點索引(由於延遲,主題/closest_waypoints與/final_waypoints不一致)
int closest_idx = -1;
for (int i = 0; i < (int)base_waypoints_.waypoints.size(); ++i) {
const double d = sq_dist(final_waypoints.waypoints[1].pose.pose.position, base_waypoints_.waypoints[i].pose.pose.position);
if (d < 0.01) {
closest_idx = i;
break;
}
}
if (closest_idx == -1) {
ROS_ERROR("cannot find closest base_waypoints' waypoint to final_waypoints.waypoint[1] !!");
}
int base_start = std::max(closest_idx - back_waypoints_num_, 0);
//找到最近跑過的點,以當前點開始,往後倒back_waypoints_num個點作爲back優化點。
for (int i = base_start; i < closest_idx; ++i)
{
//往後倒back_waypoints_num個點作爲back優化點,將這幾個back點加入到mpc的局部路徑點
mpc_waypoints.waypoints.push_back(base_waypoints_.waypoints.at(i));
mpc_waypoints.waypoints.back().twist = final_waypoints.waypoints[1].twist;
}
同樣也需要將往前走的幾個點加入到mpc路點容器
int final_end = std::min(front_waypoints_num_ + 1, (int)final_waypoints.waypoints.size());
for (int i = 1; i < final_end; ++i)
{
mpc_waypoints.waypoints.push_back(final_waypoints.waypoints.at(i));
}
發佈mpc用到的局部路點
pub_waypoints_.publish(mpc_waypoints);
}
主節點:/mpc_follower
主要節點在mpc_follower/mpc_follower_core.cpp裏面,先從頭文件查看有哪些主要函數
- 得到參考路徑
- 回調接收測試車當前Pose和Status
- 發佈了兩種commands,分別是通用的twist和autoware自定義的cmd
- MPC解算
- RVIZ可視化和twist估計以便debug
/**
* @brief set current_waypoints_ with receved message
*/
void callbackRefPath(const autoware_msgs::Lane::ConstPtr &);
/**
* @brief set vehicle_status_.pose with receved message
*/
void callbackPose(const geometry_msgs::PoseStamped::ConstPtr &);
/**
* @brief set vehicle_status_.twist and vehicle_status_.tire_angle_rad with receved message
*/
void callbackVehicleStatus(const autoware_msgs::VehicleStatus &msg);
/**
* @brief publish control command calculated by MPC
* @param [in] vel_cmd velocity command [m/s] for vehicle control
* @param [in] acc_cmd acceleration command [m/s2] for vehicle control
* @param [in] steer_cmd steering angle command [rad] for vehicle control
* @param [in] steer_vel_cmd steering angle speed [rad/s] for vehicle control
*/
void publishControlCommands(const double &vel_cmd, const double &acc_cmd,
const double &steer_cmd, const double &steer_vel_cmd);
/**
* @brief publish control command as geometry_msgs/TwistStamped type
* @param [in] vel_cmd velocity command [m/s] for vehicle control
* @param [in] omega_cmd angular velocity command [rad/s] for vehicle control
*/
void publishTwist(const double &vel_cmd, const double &omega_cmd);
/**
* @brief publish control command as autoware_msgs/ControlCommand type
* @param [in] vel_cmd velocity command [m/s] for vehicle control
* @param [in] acc_cmd acceleration command [m/s2] for vehicle control
* @param [in] steer_cmd steering angle command [rad] for vehicle control
*/
void publishCtrlCmd(const double &vel_cmd, const double &acc_cmd, const double &steer_cmd);
/**
* @brief calculate control command by MPC algorithm
* @param [out] vel_cmd velocity command
* @param [out] acc_cmd acceleration command
* @param [out] steer_cmd steering command
* @param [out] steer_vel_cmd steering rotation speed command
*/
bool calculateMPC(double &vel_cmd, double &acc_cmd, double &steer_cmd, double &steer_vel_cmd);
/* debug */
bool show_debug_info_; //!< @brief flag to display debug info
ros::Publisher pub_debug_filtered_traj_; //!< @brief publisher for debug info
ros::Publisher pub_debug_predicted_traj_; //!< @brief publisher for debug info
ros::Publisher pub_debug_values_; //!< @brief publisher for debug info
ros::Publisher pub_debug_mpc_calc_time_; //!< @brief publisher for debug info
ros::Subscriber sub_estimate_twist_; //!< @brief subscriber for /estimate_twist for debug
geometry_msgs::TwistStamped estimate_twist_; //!< @brief received /estimate_twist for debug
/**
* @brief convert MPCTraj to visualizaton marker for visualization
*/
void convertTrajToMarker(const MPCTrajectory &traj, visualization_msgs::Marker &markers,
std::string ns, double r, double g, double b, double z);
/**
* @brief callback for estimate twist for debug
*/
void callbackEstimateTwist(const geometry_msgs::TwistStamped &msg) { estimate_twist_ = msg; }
};
這也符合mpc的基本流程

圖片轉自這裏



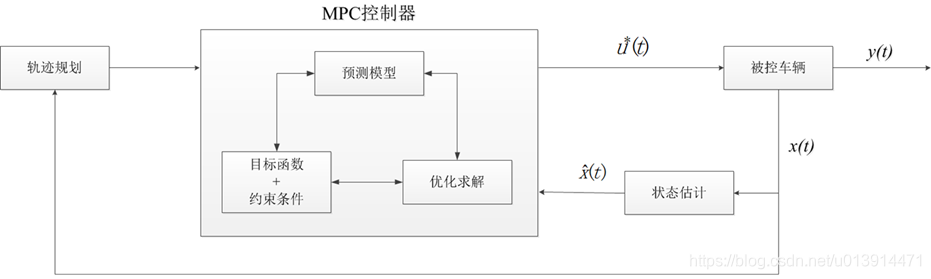{kind=link}