




參考博客:https://www.learnopencv.com/homography-examples-using-opencv-python-c/
什麼是單應性?
考慮圖1所示的平面的兩個圖像(書的頂部)。紅點表示兩個圖像中的相同物理點。在計算機視覺術語中,我們稱這些對應點。圖1.用四種不同的顏色(紅色,綠色,黃色和橙色)顯示了四個對應的點。那麼單應矩陣是,在一個圖像中的點映射到另一圖像中的對應點的變換(3×3矩陣)。
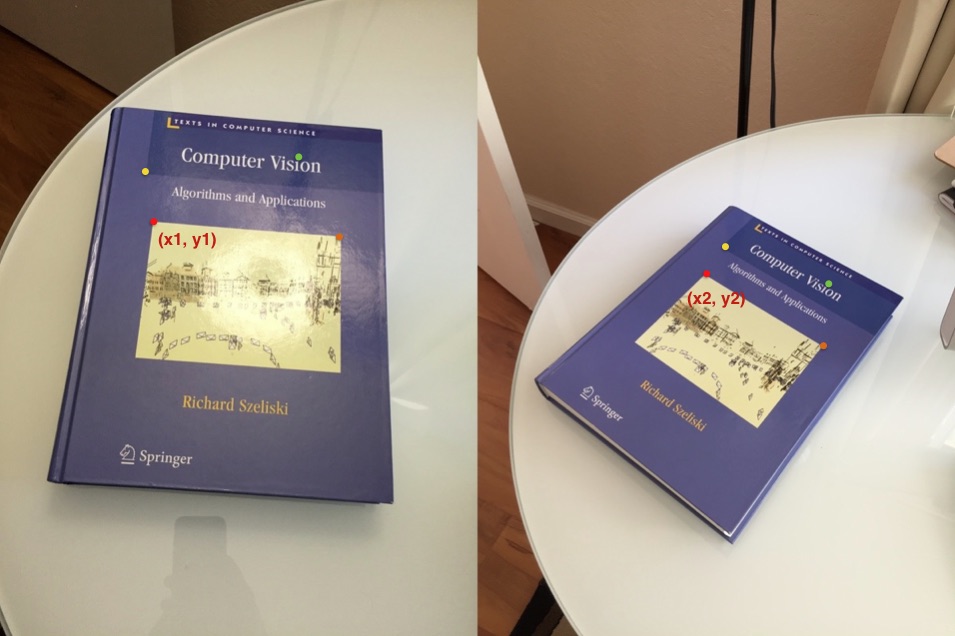
圖1:3D平面的兩幅圖像(本書頂部)通過同影法相關聯
現在,由於單應性是一個3×3矩陣,可以將其寫爲
![\ [H = \ left [\ begin {array} {ccc} h_ {00}&h_ {01}&h_ {02} \\ h_ {10}&h_ {11}&h_ {12} \\ h_ {20 }&h_ {21}&h_ {22} \ end {array} \ right] \]](https://pic1.xuehuaimg.com/proxy/csdn/https://imgconvert.csdnimg.cn/aHR0cHM6Ly93d3cubGVhcm5vcGVuY3YuY29tL3dwLWNvbnRlbnQvcWwtY2FjaGUvcXVpY2tsYXRleC5jb20tMGU1MDFhOTlhNzMyYWFkM2Y3YTkxMTI5NGI5NDJhYTBfbDMucG5n?x-oss-process=image/format,png)
考慮第一組對應點- 


![\ [\ left [\ begin {array} {c} x_1 \\ y_1 \\ 1 \ end {array} \ right]&= H \ left [\ begin {array} {c} x_2 \\ y_2 \\ 1 \ end {array} \ right]&= \ left [\ begin {array} {ccc} h_ {00}&h_ {01}&h_ {02} \\ h_ {10}&h_ {11}&h_ {12} \\ h_ {20}&h_ {21}&h_ {22} \ end {array} \ right] \ left [\ begin {array} {c} x_2 \\ y_2 \\ 1 \ end {array} \ right] \]](https://pic1.xuehuaimg.com/proxy/csdn/https://imgconvert.csdnimg.cn/aHR0cHM6Ly93d3cubGVhcm5vcGVuY3YuY29tL3dwLWNvbnRlbnQvcWwtY2FjaGUvcXVpY2tsYXRleC5jb20tNWVkNDkxMGVjMjczYWQzMDYyNmY1NWVlZmU1YjAzNzNfbDMucG5n?x-oss-process=image/format,png)
單應性矩陣的計算
main.cpp:實現單應性矩陣的計算與圖像的對齊;其餘代碼文件和數據下載地址:https://github.com/zwl2017/ORB_Feature
注意:需要在release模式下運行
#include <iostream>
#include <string>
#include "gms_matcher.h"
#include "ORB_modify.h"
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
//Check settings file
const string strSettingsFile = "../model//TUM2.yaml";
cv::FileStorage fsSettings(strSettingsFile.c_str(), cv::FileStorage::READ);
cv::Mat img1 = imread("../data//1.png", CV_LOAD_IMAGE_COLOR);
cv::Mat img2 = imread("../data//2.png", CV_LOAD_IMAGE_COLOR);
cv::Mat im_src = img2.clone();
cv::Mat im_dst = img2.clone();
ORB_modify ORB_left(strSettingsFile);
ORB_modify ORB_right(strSettingsFile);
ORB_left.ORB_feature(img1);
ORB_right.ORB_feature(img2);
vector<DMatch> matches_all, matches_gms;
BFMatcher matcher(NORM_HAMMING);
matcher.match(ORB_left.mDescriptors, ORB_right.mDescriptors, matches_all);
// GMS filter
std::vector<bool> vbInliers;
gms_matcher gms(ORB_left.mvKeysUn, img1.size(), ORB_right.mvKeysUn, img2.size(), matches_all);
int num_inliers = gms.GetInlierMask(vbInliers, false, false);
cout << "Get total " << num_inliers << " matches." << endl;
// collect matches
for (size_t i = 0; i < vbInliers.size(); i++)
{
if (vbInliers[i] == true)
matches_gms.push_back(matches_all[i]);
}
// draw matching
cv::Mat show = gms.DrawInlier(img1, img2, ORB_left.mvKeysUn, ORB_right.mvKeysUn, matches_gms, 2);
imshow("ORB_matcher", show);
std::vector<cv::Point2f> pts_src, pts_dst;
for (size_t i = 0; i < matches_gms.size(); i++)
{
pts_src.push_back(ORB_left.mvKeysUn[matches_gms[i].queryIdx].pt);
pts_dst.push_back(ORB_right.mvKeysUn[matches_gms[i].trainIdx].pt);
}
// Calculate Homography
cv::Mat h = findHomography(pts_src, pts_dst, RANSAC, 3, noArray(), 2000);
// Output image
cv::Mat im_out;
// Warp source image to destination based on homography
warpPerspective(im_src, im_out, h, im_dst.size());
// Display images
imshow("Source Image", im_src);
imshow("Destination Image", im_dst);
imshow("Warped Source Image", im_out);
waitKey(0);
}
結果:


單應性矩陣的計算與圖像校正
注意點擊圖像的順序爲順時針
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
struct userdata {
Mat im;
vector<Point2f> points;
};
void mouseHandler(int event, int x, int y, int flags, void* data_ptr)
{
if (event == EVENT_LBUTTONDOWN)
{
userdata *data = ((userdata *)data_ptr);
circle(data->im, Point(x, y), 3, Scalar(0, 0, 255), 5, CV_AA);
imshow("Image", data->im);
if (data->points.size() < 4)
{
data->points.push_back(Point2f(x, y));
}
}
}
int main(int argc, char** argv)
{
// Read source image.
Mat im_src = imread("../data//book1.jpg");
// Destination image. The aspect ratio of the book is 3/4
Size size(300, 400);
Mat im_dst = Mat::zeros(size, CV_8UC3);
// Create a vector of destination points.
vector<Point2f> pts_dst;
pts_dst.push_back(Point2f(0, 0));
pts_dst.push_back(Point2f(size.width - 1, 0));
pts_dst.push_back(Point2f(size.width - 1, size.height - 1));
pts_dst.push_back(Point2f(0, size.height - 1));
// Set data for mouse event
Mat im_temp = im_src.clone();
userdata data;
data.im = im_temp;
cout << "Click on the four corners of the book -- top left first and" << endl
<< "bottom left last -- and then hit ENTER" << endl;
// Show image and wait for 4 clicks.
imshow("Image", im_temp);
// Set the callback function for any mouse event
setMouseCallback("Image", mouseHandler, &data);
waitKey(0);
// Calculate the homography
Mat h = findHomography(data.points, pts_dst);
// Warp source image to destination
warpPerspective(im_src, im_dst, h, size);
// Show image
imshow("Image", im_dst);
waitKey(0);
return 0;
}
數據可以這裏找到:https://github.com/spmallick/learnopencv/tree/master/Homography
結果:

單應性矩陣的計算與圖像投影
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
struct userdata {
Mat im;
vector<Point2f> points;
};
void mouseHandler(int event, int x, int y, int flags, void* data_ptr)
{
if (event == EVENT_LBUTTONDOWN)
{
userdata *data = ((userdata *)data_ptr);
circle(data->im, Point(x, y), 3, Scalar(0, 255, 255), 5, CV_AA);
imshow("Image", data->im);
if (data->points.size() < 4)
{
data->points.push_back(Point2f(x, y));
}
}
}
int main(int argc, char** argv)
{
// Read in the image.
Mat im_src = imread("../data//first-image.jpg");
Size size = im_src.size();
// Create a vector of points.
vector<Point2f> pts_src;
pts_src.push_back(Point2f(0, 0));
pts_src.push_back(Point2f(size.width - 1, 0));
pts_src.push_back(Point2f(size.width - 1, size.height - 1));
pts_src.push_back(Point2f(0, size.height - 1));
// Destination image
Mat im_dst = imread("../data//times-square.jpg");
// Set data for mouse handler
Mat im_temp = im_dst.clone();
userdata data;
data.im = im_temp;
//show the image
imshow("Image", im_temp);
cout << "Click on four corners of a billboard and then press ENTER" << endl;
//set the callback function for any mouse event
setMouseCallback("Image", mouseHandler, &data);
waitKey(0);
// Calculate Homography between source and destination points
Mat h = findHomography(pts_src, data.points);
// Warp source image
warpPerspective(im_src, im_temp, h, im_temp.size());
// Extract four points from mouse data
Point pts_dst[4];
for (int i = 0; i < 4; i++)
{
pts_dst[i] = data.points[i];
}
// Black out polygonal area in destination image.
fillConvexPoly(im_dst, pts_dst, 4, Scalar(0), CV_AA);
// Add warped source image to destination image.
im_dst = im_dst + im_temp;
// Display image.
imshow("Image", im_dst);
waitKey(0);
return 0;
}
結果:
