






隨着汽車在人們的生活中越來越普及,駕駛體驗也越來越被用戶所重視。小區車位越來越緊張,停車難越來越困擾現代都市人。先進駕駛輔助系統(ADAS)已經開始進入中、低端車的配置表。
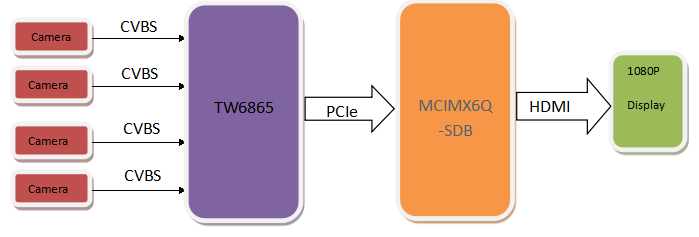
飛思卡爾作爲主流汽車芯片提供商,不僅致力於基於以太網的先進駕駛輔助系統的搭建和推廣。 同時還敏銳的察覺到了該領域低成本市場的需求。目前已經推出低成本車規等級360度環視解決方案,該方案基於i.MX6平臺,通過PCIe接口與英特矽爾(Intersil)TW6865四通道模擬視頻採集芯片相連接來實現。
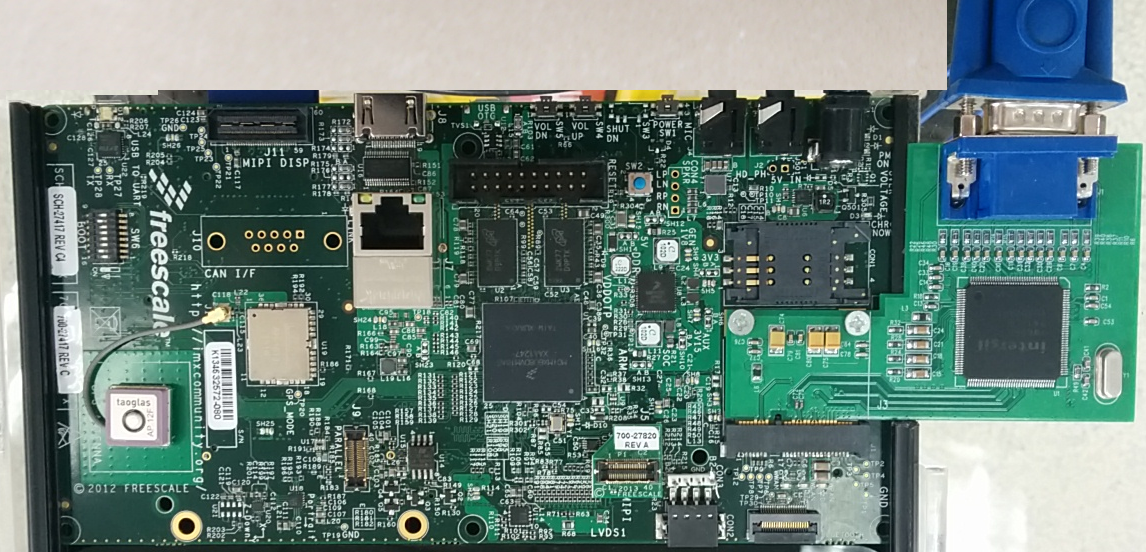
演示平臺(如下圖)已經成功搭建,相應的軟件(包含實時數據採集,魚眼校正,及圖像拼接等算法)也已經調試完畢,實現效果已經達到主流汽車電子廠商的需求。
這意味着,與當前高端方案相比,它能夠以極少的軟硬件資源實現基本的環視功能。同時它還具備飛思卡爾領先市場的功耗和成本效益優勢。結合飛思卡爾打包提供的資源庫、以及硬件和軟件開發套件,使其可以在當前的i.MX6平臺上,幫助汽車電子方案商迅速地將環視系統產品化,贏得市場。

下面用一個簡單的表格將該方案與以太網方案進行對比。
|
|
以太網方案 |
模擬方案 |
|
方案成熟度 |
爲汽車量身定製,剛起步 |
源自安防領域,成熟 |
|
針對市場 |
中高端 |
中低端 |
|
成本 |
高 |
低 |
|
應用 |
自動駕駛等 |
泊車輔助等 |
|
可擴展性 |
高 |
低 |
|
方案複雜度 |
中等 |
低 |
硬件系統框圖:
軟件數據流框圖:

基於Linux V4l2架構的TW6865驅動程序用DMA抓取CVBS攝像頭的數據;然後由飛思卡爾IMX6應用處理器的圖像處理單元(IPU)對抓到的隔行CVBS圖像進行解交織(De-interlace)處理得到去鋸齒平滑後的圖像;最後平滑後的4個攝像頭圖像用iMX6的GPU混合後顯示到顯示屏上。
在4個攝像頭同時工作的情況下,本方案整套軟件在iMX6雙核CPU上的負載小於10%。另外在支持4路攝像頭顯示的同時,本方案還支持後臺錄像功能,可以把某幾路的CVBS攝像頭圖像數據錄製成H.264文件,用做行車記錄儀功能。